S - start point
E - end point
@ - path
# - obstacle
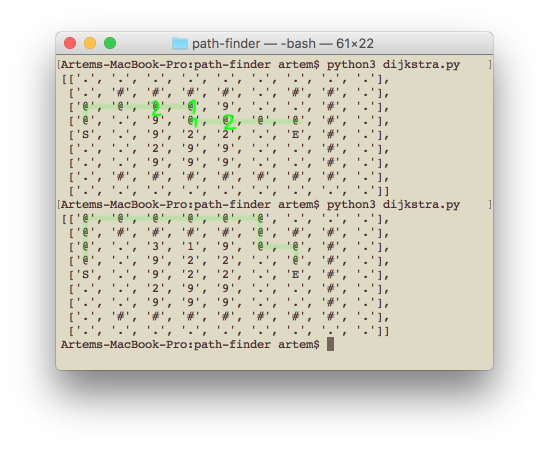
1 - cost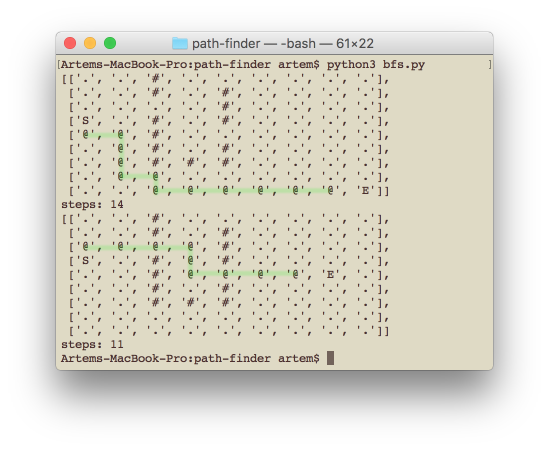
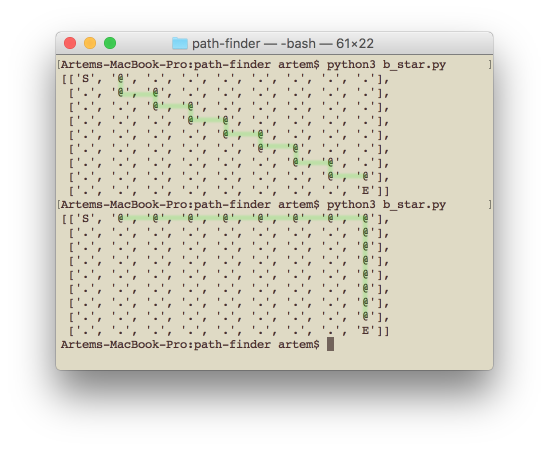
manhattan vs euclidean heuristic distance
finds the cheapest path (. is 1 by default)
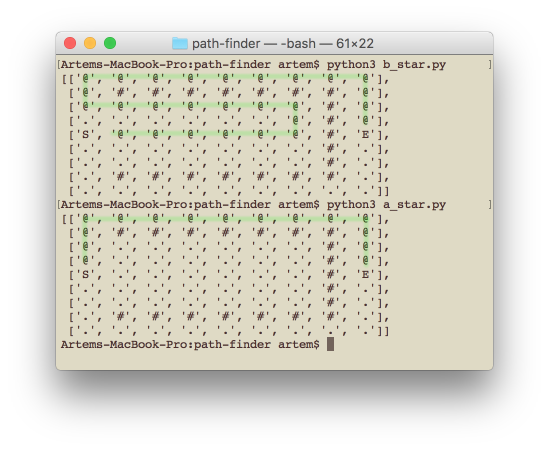
in some cases B* can't find the shortest path, A* always finds the shortest or cheapest path
| Name | Name | Last commit date | ||
|---|---|---|---|---|
S - start point
E - end point
@ - path
# - obstacle
1 - cost
manhattan vs euclidean heuristic distance
finds the cheapest path (. is 1 by default)
in some cases B* can't find the shortest path, A* always finds the shortest or cheapest path