2. Hardware Assembly
Let's get started by laying out everything that comes with the TortoiseBot Kit.

So just make sure you have everything with you according to this table:
| Components | Description | Quantity |
|---|---|---|
| TortoiseBot Chassis Plate | Custom Laser-cut TortoiseBot Chassis | 4 |
| BO Motor | 60 RPM with soldered wires | 2 |
| BO Motor Wheel | 65 mm diameter, 25 mm thickness | 2 |
| BO Motor Brackets | Metal Brackets to mount motors to chassis | 2 |
| Motor Mounts | Separate Left & Right 3D Printed Mounts | 2 |
| Caster Wheel | 1 | |
| Raspberry Pi 4 Model B | With 2 GB RAM | 1 |
| SD Card | 16 GB Class 10 SD Card with Pre-loaded OS and Codes | 1 |
| Card Reader | For reconfiguring SD Card | 1 |
| Raspberry Pi Camera | Rev 1.3, 5 MP Camera | 1 |
| Camera Mount | 3D printed top and bottom Camera Mount pieces | 2 |
| Raspberry Pi Power Cable | Standard USB to USB Type C Cable | 1 |
| Li-ion Battery | 11.1 V 2000 mAh | 1 |
| Battery Charger | 12 V 2 Amp DC Adaptor | 1 |
| Battery Checker | Battery % Checker with DC Jack | 1 |
| Voltage Stabilizer Module | Battery Connector with USB Power Module | 1 |
| Motor Driver | L298N Dual H-bridge Motor Driver | 1 |
| Jumper Wires | Female to Female | 6 |
| Hex Spacers | 45mm height M3 Hex Metal Spacers | 18 |
| M3 10 mm Bolts | 40 | |
| M3 25 mm Bolts | 4 | |
| M3 Nuts | 44 | |
| M3 Washers | 4 | |
| M2 10 mm Bolts | 2 | |
| M2 Nuts | 2 | |
| Screw Driver | 2 in 1 Flat and Philips Head Screw Driver with Tester | 1 |
| LiDAR Kit | with LiDAR module, USB Cable and Data Convertor Box | 1 |
Take the following components:
- M3 10 mm Bolts x 2
- M3 25 mm Bolts x 2
- M3 Nuts x 2
- BO Motor Bracket x 1
- BO Motor x 1
Please note to take the BO Motor, whose shaft points in the left direction when the 2-way-tape is facing downward and the wires are pointing you. Refer to the picture below. This is your Left Motor.

Now attach the Motor Bracket on the flat side of the motor in a way that the screw holes are facing outwards and at the bottom side and also the holes of the motor align with the farther most holes of the motor brackets. After that put the 10 mm M3 bolts in the bottom holes. Do not tighten these bolts with nuts yet.
 .
. 
Now thread both the 25 mm M3 bolts from the outer end (from the side where there is a shaft) of the motor and attach them with nuts on the other end. Repeat the procedure for the other motor as well. So now you have two motors with the shaft facing outwards and screw holes facing inwards and the 2-way-sticking tape facing downwards.






Now take one of the Chassis plates and place it in the following orientation. The Top is the Front of the Robot and your right and left are the right and left of the robot respectively. Remove the protective paper covering from both the sides to get shiny acrylic inside.


Now use the red highlighted holes and put the 10mm M3 bolts through them and tighten them with nuts from below. You can also remove the double-sided tape cover and use it to secure your motors in place for additional strength. If you are facing any problem in building your robot, you could Join our Discord Community and ask your doubts or questions over there. Our community will be there to help and guide you through the complete process.



Take the caster wheel, remove the plastic covering, and using a pair of nut and bolt, fix it in the highlighted hole from the bottom side. You can use more than one nut and bolt to secure it in place, but one is more than enough




Now you can attach wheels to the motors after which take 6 Hex spacers along with 18 nuts and fix them in these highlighted holes. Also, you can attach the battery in the centre using double-sided tape.




With this you have the base of your TortoiseBot ready!
Now let's make the Heart of our Robot. The place where the blood (electrons) are pumped all over our TortoiseBot's body.
USB module will give power to Raspberry Pi. Positive-Negative terminal give power to L298N Motor Driver. Attach battery to the female DC jack. Connections for raspberry pi to L298N and L298N to motors are same for both power distribution systems , given further.



Here we have the Motor Driver and the Power Distribution Module. Take another Chassis plate and keep the orientation the same as the previous one. Also have the L298N Motor Driver, USB Power Distribution module and the Data Convertor from LiDAR's box handy. You can disconnect the wire from LiDAR as we will attach it later. Your power distribution module will look a little different if you have the production version of TortoiseBot. It will include Male Jumpers and also an On/Off Switch. The 0 on switch means it's OFF and 1 on the switch means it's ON.

Once you have it all, you can attach Motor Driver and LiDAR Data Converter Module each with 4 pairs of nuts and bolts through the blue and green highlighted holes respectively. Make sure the heatsink of the motor driver is facing the front link in the picture while attaching. Similarly, while attaching the LiDAR data convertor, the wires should be on the top side and the USB ports should be facing you on the backside of the robot. Also, you can fix the USB Power Module Simply with Double-sided tape on the given position.




Now based upon the readings you got on the printed sheet with your order, you have to attach wires to the Motor Driver. For me, the Battery's positive and negative wires are Green and Yellow respectively. So I will attach the Green Wire coming from Battery Connector to the Left most screw connector on Motor Driver and Yellow wire to the screw connector next to it which is the middle one. Also while connecting your Battery's negative wire, get your bunch of female to female wires and take the wire whose connector is broken, and fix it along with the existing battery's negative wire in the middle screw connector. In my case, it was the black wire. Both of these wires will go in the same hole which is the middle one and the positive wire will go in the left connector.
💡 PLEASE NOTE: If you have updated received an updated version of TortoiseBot, we don't ship extra Female to Female wire with it for ground connection. The ground is already made common from the power distribution module. So you just need to connect Positive and Negative wires coming from battery to the motor driver.
Make sure your connections are proper. If you are facing any problem in building your robot, you could Join our Discord Community and ask your doubts or questions over there. Our community will be there to help and guide you through the complete process.



Now take the base of the robot and the plate you made just now and place them second above the first one. While placing it, make sure you pass the motor wires from the highlighted holes. Left hole for left motor wires and right hole for right motor wire. Don't bolt the plate down yet.



Take the 3D printed motor mounts and place them as shown in the picture. Both of them are mirror image of each other. Place them in a way that the raised pillars are on your side and both of them are outwards. And now pass them through the highlighted holes. And simply place them above the motors. It is to make the whole base more sturdy.



Now, look at the wires of your Left Side. Make a note of which coloured wire is at the top and which one is at the bottom. You should also be able to see this written on the provided connection sheet with your kit. In this case, for the left motor, our bottom wire is RED and the top wire is GREEN. So keeping that in mind, we will connect our top wire (GREEN) in the front of the motor driver (towards the heatsink) and the bottom wire (RED) towards the backside (near other connection points). Refer to the images below and the connection sheet provided with your kit. Please make sure these connections are made properly or else your Robot will not move in the expected directions. Similarly, if we have a look at our motor on the right side, the top wire is RED in this case and the bottom wire is GREEN. So again we will connect the top wire (RED) towards the side of the heatsink and the bottom wire (GREEN) towards the connection side. Note to cross-check the connections. This is the most important step of building the robot.




After that use, the RED highlighted holes to bolt down the spacers and use the BLUE highlighted holes to add more spacers on top of the existing spacers through the TortoiseBot Chassis Plate like in the picture. Also, use the GREEN highlighted holes to add more spacers which you can tighten with nuts from the bottom.


Finally, for stage number 2, connect all of your remaining female-to-female jumper wires (6) to the motor driver's pins, as instructed on your connection sheet. Make sure to remove the short jumpers from the enable pins. Keep them safe as you may need them later in the future. Also, make sure you don't connect the wires to the inner pins of enables. All the connections will be in one line. And with this, you are done with building the second level of TortoiseBot. 50% done. More 2 to go...



This is the easiest layer to assemble. But before you do this step, you need to make a couple of changes to your SD Card in order to connect your robot to your Wi-Fi. Follow these steps to configure your SD Card with your Wi-Fi connection. Once you are done with it, put your SD card back in your Raspberry Pi in the orientation shown in the image. And then use the RED highlighted holes to attach the Raspberry Pi with a new Chassis Plate using 4 pairs of nuts and bolts.



Now place this plate on top of your assembled robot and pass the LiDAR Data Wire from the GREEN highlighted hole and all other Jumper Wires ( 7 in total ) from the BLUE highlighted hole. And finally, bolt it all down using the RED highlighted holes.




Use the included USB A to USB C cable to connect the Power Distribution Board to the Raspberry Pi. You can pass the wire through the inside of the spacers in order to keep everything clean and no wires hanging around. Also, connect all 7 jumper wires to Raspberry Pi based upon the connections given on the connection sheet. You can also refer Raspberry Pi GPIO diagram for checking out the pin numbers.
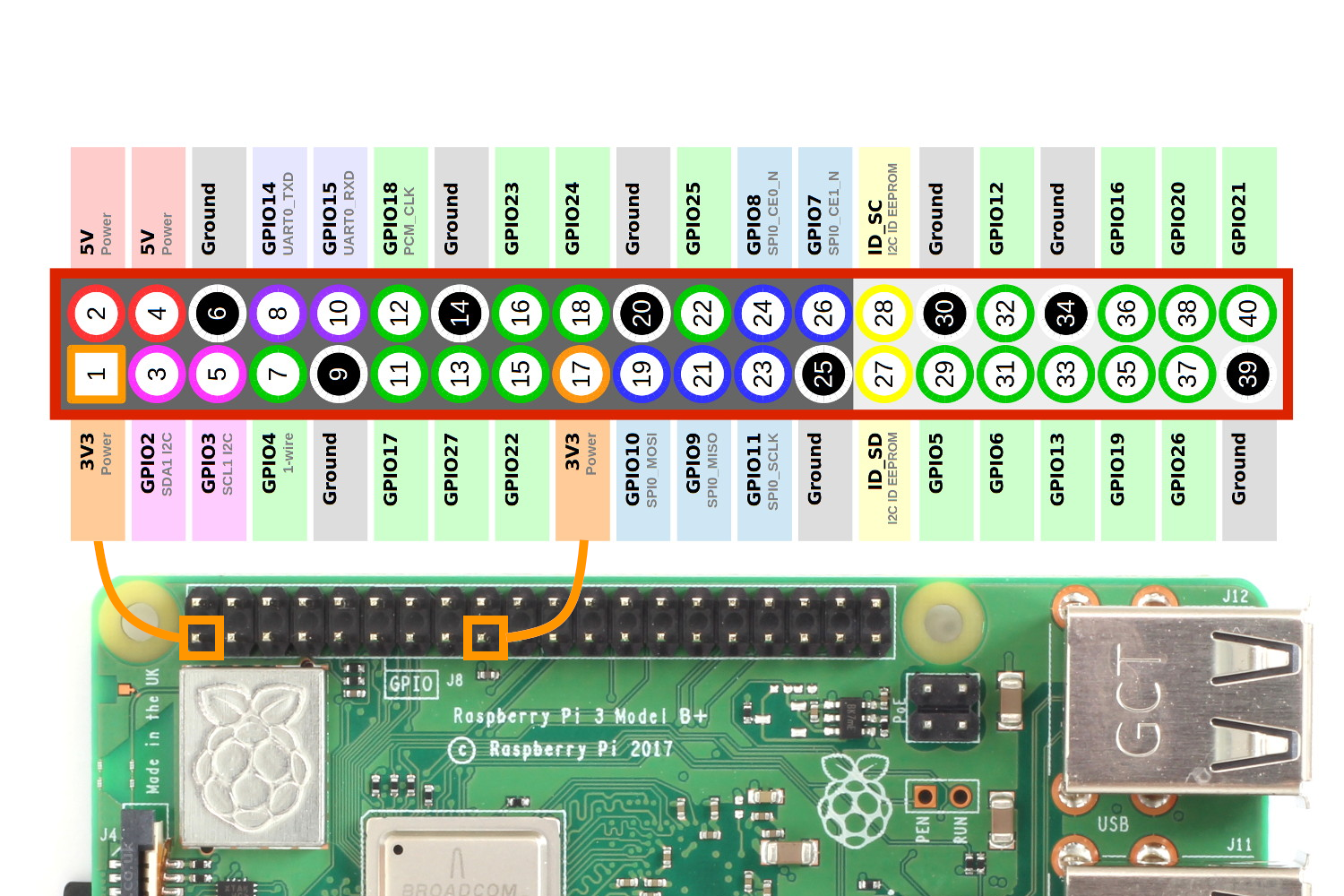{kind=link}
💡 PLEASE NOTE: If you have updated received an updated version of TortoiseBot, we don't ship extra Female to Female wire with it for ground connection. The ground is already made common from the power distribution module. So you just need to connect Positive and Negative wires coming from battery to the motor driver.
Also, connect the USB cable that comes with LiDAR and plug the USB A end in one of the USB 3.0 Ports of the Raspberry Pi which is highlighted in blue colour and another end to the LiDAR Data Box. If you are facing any problem in building your robot, you could Join our Discord Community and ask your doubts or questions over there. Our community will be there to help and guide you through the complete process.






Now take 6 Pairs of Nuts and Spacers and attach them through the RED highlighted holes.


Grab the final plate. This is where we will be attaching all our sensors i.e. LiDAR and Camera. So to attach that, also grab the 3D Printed Camera Mounts. Both of these parts are different. So don't get confused between them. The one with the flat base will be referred as Camera Mount Top and the one with a step-like structure will be referred as Camera Mount Bottom. The Camera Mount Top is attached to the Plate and the Bottom will be connected to the Camera.


Now use the RED highlighted holes to assemble the Camera Mount Top to the Chassis Plate at its underside using 2 pairs of nuts and bolts. Refer to the picture for more clarity.


Now take the Bottom Camera mount and Raspberry Pi Camera and fix them together using M2 Nut and Bolts. The Small ones. I am using a self-tapping screw here, but along with your kit, you might have got nuts and bolts. So use that to secure the camera in place. The step-like design is to accommodate the ribbon cable connector of the camera. So make sure it is flushed while attaching.


Now attach both the Camera Pieces together with a pair of M3 nut-bolt. You can also use pair of washers on both ends to make the joint firm and adjustable at the same time.





Take the rest of the assembled Robot, and attach the Raspberry Pi Camera to Raspberry Pi using the ribbon cable. Make sure the connections on the cable are facing away from the USB ports. Once that is done, you can place the plate on the robot and take the LiDAR wire out of the big circular hole as shown in the picture. And then bolt the spacers down with M3 10mm bolts through the RED highligted holes.




Now take the LiDAR and attach the LiDAR cable to its bottom as shown in the image. Then pass the wire through the small notch around the circle and then pass the LiDAR motor through the big hole and making sure the wire is passed through the notch properly. Take 2 more pairs of nut bolts and use them to secure the LiDAR in place.






With this, you have your complete robot assembled. If you face any problem in building your robot, you could Join our Discord Community and ask your doubts or questions over there. Our community will be there to help and guide you through the complete process. Finally, for touch-ups, you could stick your Battery Checker on the top of the robot as shown in the image.




Once you are done with assembling the robot, you could start Setting up TortoiseBot so that it could connect to your Local Wi-Fi and you could start coding it using ROS