-
Notifications
You must be signed in to change notification settings - Fork 376
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Add a simple example to display Open Photogrammetry Format datasets (#…
…2512) ### What Add a simple example to display Open Photogrammetry Format datasets 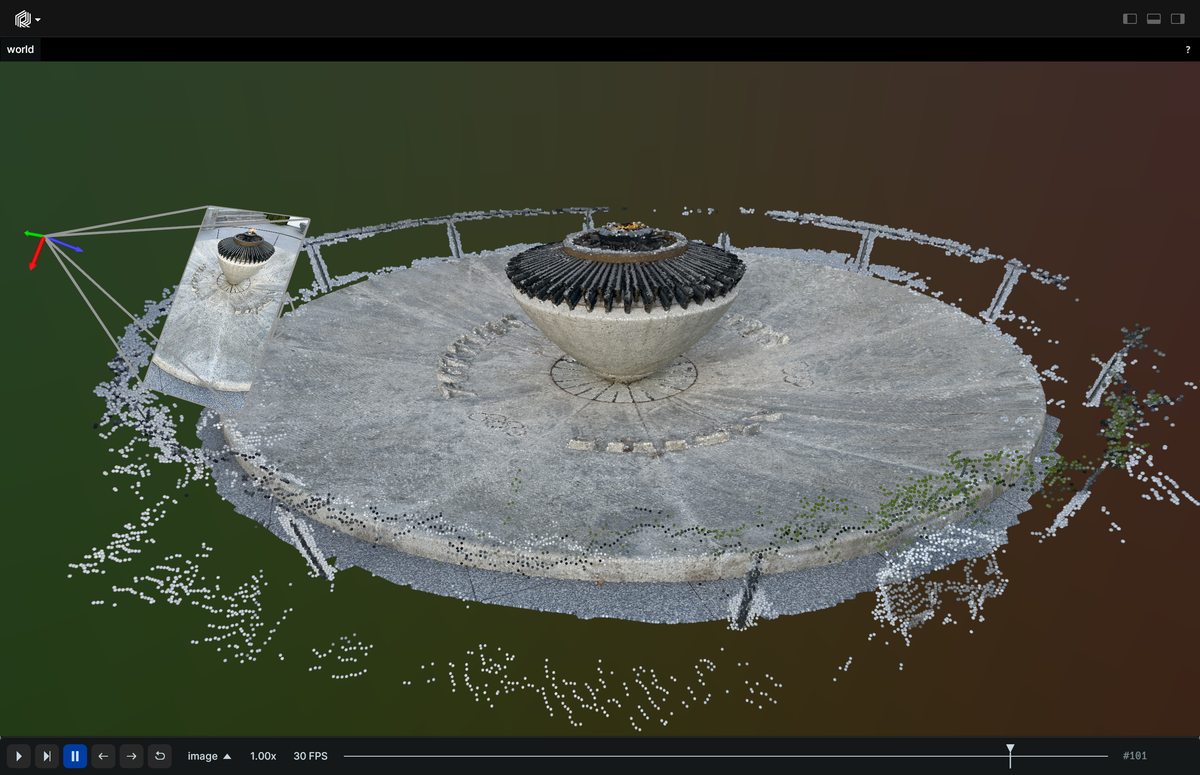 This example is currently minimalist in that there is lots more in the OPF that could be displayed, such as uncalibrated vs. calibrated cameras, matches between points and cameras, etc. Also, I opted to display each calibrated camera as individual frames in the timeline, as displaying them currently spams the viewer with image views. Closes #2246 Would greatly benefit from #1136 Blocked by #2244 ### Checklist * [x] I have read and agree to [Contributor Guide](https://github.com/rerun-io/rerun/blob/main/CONTRIBUTING.md) and the [Code of Conduct](https://github.com/rerun-io/rerun/blob/main/CODE_OF_CONDUCT.md) * [x] I've included a screenshot or gif (if applicable) <!-- This line will get updated when the PR build summary job finishes. --> PR Build Summary: https://build.rerun.io/pr/2512 <!-- pr-link-docs:start --> Docs preview: https://rerun.io/preview/c1fd3e3/docs Examples preview: https://rerun.io/preview/c1fd3e3/examples <!-- pr-link-docs:end --> --------- Co-authored-by: Emil Ernerfeldt <emil.ernerfeldt@gmail.com>
{kind=link}
- Loading branch information
Showing
14 changed files
with
338 additions
and
17 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -6,7 +6,7 @@ | |
| **/target_wasm | ||
|
|
||
| # Python virtual environment: | ||
| **/venv | ||
| **/venv* | ||
|
|
||
| # Python build artifacts: | ||
| __pycache__ | ||
|
|
||
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,25 @@ | ||
| --- | ||
| title: Open Photogrammetry Format | ||
| python: https://github.com/rerun-io/rerun/tree/latest/examples/python/open_photogrammetry_format/main.py | ||
| tags: [2d, 3d, camera, photogrammetry] | ||
| thumbnail: https://static.rerun.io/20716c6a10ffaa3960a212673adcbfff36da682e_open_photogrammetry_format_480w.png | ||
| --- | ||
|
|
||
| <picture> | ||
| <source media="(max-width: 480px)" srcset="https://static.rerun.io/20716c6a10ffaa3960a212673adcbfff36da682e_open_photogrammetry_format_480w.png"> | ||
| <source media="(max-width: 768px)" srcset="https://static.rerun.io/ed4a35b86775020956963cd464a0b32278761345_open_photogrammetry_format_768w.png"> | ||
| <source media="(max-width: 1024px)" srcset="https://static.rerun.io/832c4fe63b6abe665c5723e5664d80bf19e9c6e1_open_photogrammetry_format_1024w.png"> | ||
| <source media="(max-width: 1200px)" srcset="https://static.rerun.io/3bb25c43fa2a4c367d036c27943812ebfe3e4d42_open_photogrammetry_format_1200w.png"> | ||
| <img src="https://static.rerun.io/603d5605f9670889bc8bce3365f16b831fce1eb1_open_photogrammetry_format_full.png" alt=""> | ||
| </picture> | ||
|
|
||
|
|
||
| Use [pyopf](https://github.com/Pix4D/pyopf) to load and display a photogrammetrically reconstructed 3D point cloud in the Open Photogrammetry Format (OPF). | ||
|
|
||
|
|
||
| ```bash | ||
| pip install -r examples/python/open_photogrammetry_format/requirements.txt | ||
| python examples/python/open_photogrammetry_format/main.py | ||
| ``` | ||
|
|
||
| Requires Python 3.10 or higher because of [pyopf](https://pypi.org/project/pyopf/). |
Oops, something went wrong.