If you find this useful, please consider giving us a star ⭐
Official repo for: ClaraVid: A Holistic Scene Reconstruction Benchmark From Aerial Perspective With Delentropy-Based Complexity Profiling - Accepted ICCV 2025
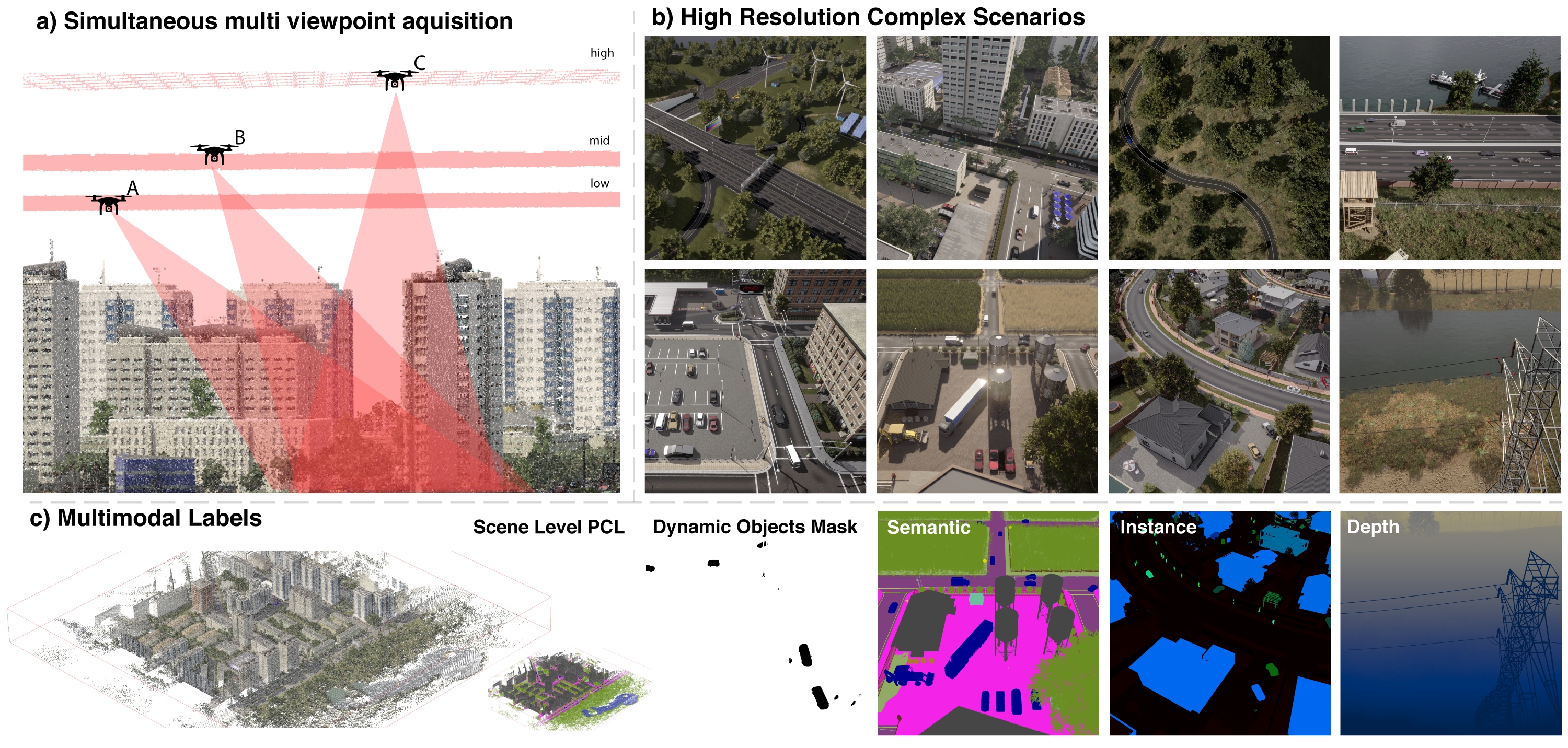
ClaraVid is a synthetic dataset built for semantic and geometric neural reconstruction from low altitude UAV/aerial imagery. It contains 16,917 multimodal frames collected across 8 UAV missions over 5 diverse environments: urban, urban high, rural, highway, and nature.
Delentropic Scene Profile (DSP) is a metric for estimating scene complexity from images, tailored for structured UAV mapping scenarios. DSP helps predict reconstruction difficulty.
- All data uploaded
- Release dataset SDK
- Release pip package
- Release dataset splits
- Add Nerfstudio support
- Dataset download script
- Release DSP code (closer to conference)
Easiest way to install this package is to use pip:
pip install claravid Alternatively you can clone the repository and install it manually:
git clone https://github.com/rdbch/claravid_code.git
pip install -e .
We provide 2 examples for this code base:
In examples/demo.ipynb we provide an example for loading and exploring a scene and configuring the various flight parameters and modalities:
from claravid import ClaravidDataset
dataset = ClaravidDataset(
root=Path('/path/to/claravid'),
missions=['highway_1', ], # see ClaravidMissions
altitude=['low', ], # see ClaravidAltitude
direction=['v', 'h'], # see ClaravidGridDirection
fields=['rgb', 'pan_seg', 'depth', ...],
)
data = dataset[0]
{"rgb":..., "pan_seg":..., "depth":..., ...}In examples/pcl_project.py we provide an example for loading the scene PCL and projecting it to back to a certain frame. This serves as an example on how to handle extrinsics, 3D un/projection and manipulating scene pointclouds.
If you found this work useful, please cite us as:
@misc{beche2025claravid,
title={ClaraVid: A Holistic Scene Reconstruction Benchmark From Aerial Perspective With Delentropy-Based Complexity Profiling},
author={Beche, Radu and Nedevschi, Sergiu},
journal={arXiv preprint arXiv:2503.17856},
year={2025}
}