Dimensional Control
Data quality depends directly on correct configuration of the linear and angular offsets between mapping sensors.
These offsets are typically determined through a professional survey of the vessel and sensors. At a minimum, this survey includes an origin, locations and angles (meeting manufacturer accuracy requirements for reference points on the TX and RX arrays, motion sensor(s), and GNSS antennas in a unified reference frame aligned with the vessel. The results are carefully documented in a survey report for error-free interpretation during software setup.
Many multibeam systems apply these offsets in real-time for beamforming, beemsteering, and Doppler correction, among other critical functions. Likewise, other calibration (e.g., 'patch test') results depend directly on these numbers.
Consequently, some data quality issues that arise from incorrect configuration of offsets cannot be fully addressed in post-processing.
Some important topics for the end-user are presented below:
It is common for a single survey report to be referenced routinely for the entire service life of a multibeam mapping system. When sensors are moved or replaced, the original survey is used to re-establish the vessel frame and tie in new equipment.
Keeping this in mind, the costs of a high-quality initial survey and clear report are relatively small compared to the ship (and human) time spent acquiring and processing reduced-quality data. In some cases, the vessel must be dry-docked to repeat the survey for proper mapping system configuration.
{kind=link}
The MAC developed a set of recommendations for mapping vessel survey reports based on a wide array of experiences interpreting these documents. This guide is intended to help the surveyor ensure that their final report can be easily and correctly interpreted by the vessel operator to reduce windows of opportunity for error in translation, as well as serve as a clear foundation for future vessel surveys in the years ahead.
The recommendations address a few common pitfalls:
- even 'good' survey results (meeting the manufacturer's requirements) are reported with ambiguous, inconsistent, or incorrect axis and sign conventions;
- the mapping system reference frame and sensor reference points are not clearly identified;
- the report lacks photos or diagrams of the measured locations, leading to errors in interpretation;
- mapping systems are sometimes configured using 'draft' reports before errors are discovered (e.g., when a final report is not available before sea acceptance trials).
The MAC welcomes other user experiences and recommendations related to mapping system survey reports.
Manufacturers specify the survey tolerances required to meet sensor performance expectations.
[Add references to survey tolerances]
| Manufacturer | Sensor orientation | Survey accuracy required1 | Source |
|---|---|---|---|
| Kongsberg | EM124 TX/RX array XYZ | X: 0.05 m, Y: 0.05 m, Z: 0.02 m | Kongsberg manual |
| Kongsberg | EM124 TX array angle2 | Pitch: 0.05 deg, Roll: 0.20 deg, Hdg: 0.10 deg | Kongsberg manual |
| Kongsberg | EM124 RX array angle2 | Pitch: 0.20 deg, Roll: 0.02 deg, Hdg: 0.10 deg | Kongsberg manual |
| Kongsberg | EM124 motion sensor XYZ | X: 0.05 m, Y: 0.05 m, Z: 0.05 m | Kongsberg manual |
| Kongsberg | EM124 motion sensor angle | Pitch: 0.05 deg, Roll: 0.02 deg, Hdg: 0.10 deg | Kongsberg manual |
{kind=link}
- Minimum required accuracy for basic operation; higher accuracy will minimize patch test results and improve performance
- Heading difference cannot exceed 0.10 deg between TX and RX arrays
The survey report should present offsets for clearly defined points on the vessel (e.g., benchmarks) and sensors (e.g., reference targets) for correct interpretation and configuration of sensor software.
A system geometry review must be carried out (ideally by multiple individuals) to ensure the final mapping system reference frame and sensor offsets are consistent with definitions for the reference points and axis and sign conventions.
In some cases, it is necessary to modify the reported locations by known offsets for consistency with the manufacturers' specifications and users' expectations of a unified mapping system reference frame.
This process can involve any range of adjustments, individually or en masse, from applying small vertical offsets for an antenna phase center height to adjusting the sign convention of a transducer roll angle to choosing a different mapping system origin altogether. Each step of the system geometry review should be carried out by multiple reviewers to ensure consistent interpretation.
The final reference frame must be consistent and intuitive for users in order to avoid errors in configuration. Likewise, the final offsets for each sensor must be consistent with the manufacturer's specification for software configuration.
The mapping system reference frame and the vessel / sensor reference points are reviewed to ensure the survey report can be used directly - or interpreted correctly - for configuration. The origin and sensor reference point definitions are critical for this step, as the reported location on a piece of equipment may differ from the manufacturer or user expectation.
The mapping system origin can be defined by the user. Ideally, it is a physical marker on the hull or equipment that provides an unambiguous and easily surveyed reference point.
There is tremendous value for future users to be able to identify this point with complete certainty. If a sensor reference point (e.g., MRU housing target) is used for the origin, document nearby reference points so the origin's location in space can be re-established and reported consistently if/when the sensor is removed.
Manufacturers define sensor reference points that must be interpreted correctly when configuring that sensor's software.
As with axis and sign conventions, misinterpretation of these definitions will cause data quality issues that cannot always be addressed in post-processing.
Reference points are presented below for several common sensors (alphabetical order). All units are meters unless otherwise noted.
TABLE IN DEVELOPMENT; GitHub-flavored Markdown experts welcome!
It is always recommended to confirm these conventions with the most recent manufacturer documentation. Sources are linked if publicly available; otherwise, please consult the manufacturer.
| Transducer | Reference Point | Source |
|---|---|---|
| Kongsberg EM TX/RX arrays | Center of each array face1 | Kongsberg manual |
| Kongsberg EM2040P (portable) | Transducer ref. point2 | Kongsberg manual |
| Kongsberg EM2040PHS (portable) | Transducer ref. point2 | Kongsberg manual |
| Norbit | ||
| Reson T20/T50 | Sonar ref. point (see manual)3 | Reson T-Series manual |
| Reson 7125 | ||
| Reson 7160 | Sonar ref. point (see manual)3 | Reson 7160 manual |
| R2Sonic | Acoustic centers of TX (horiz.) / RX (vert.) | R2Sonic knowledgebase |
| Simrad EK80 | Center of array face | Simrad manual (?) |
| Motion Sensor | Reference Point | Source |
| Applanix IMU | Target on housing | Applanix manual4 |
| iXBlue PHINS IMU | Sensing center | |
| Seapath MRU 5+ | Target on housing | Seapath MRU manual5 |
| Seapath MGC | Sensing center | Seapath MGC manual6 |
| Antenna | Reference Point | Source |
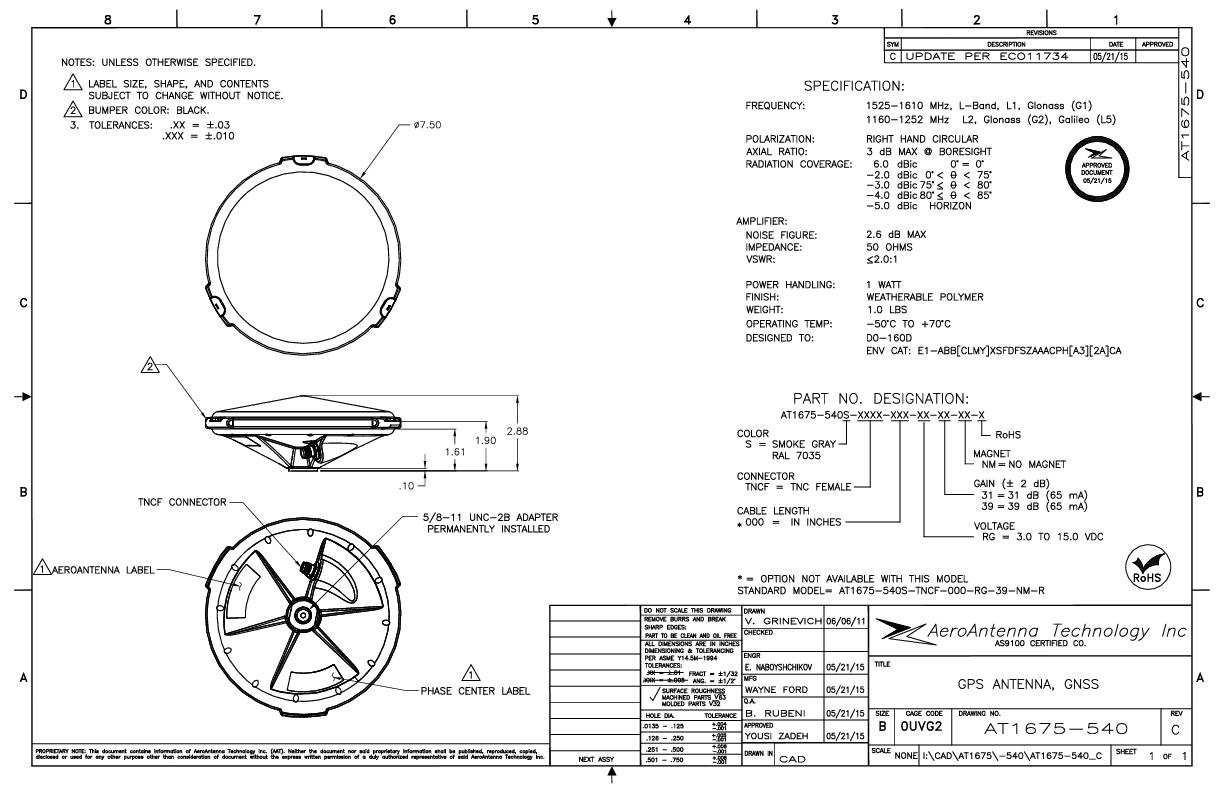
| AeroAntenna | Notch 1.90 inch above base | Antenna 'notch' specification |
| Trimble (AeroAntenna) AT1675-540-TS | Phase center 57.75 mm above base | Antenna specification |
| Trimble GA830 | Phase center 88.8 mm above base | Antenna specification |
| NovAtel GNSS-850 | Phase center 51.7 mm above base | Antenna diagram7 |
| NovAtel GPS-702-GG | Phase center 66.0 mm (L1) above base | NovAtel GPS-702/701 User Guide |
| NovAtel GPS-702-GGG | Phase center 65.0 mm above base | |
| NovAtel GPS-713-GGG-N | Phase center 61.5 mm (L1) above base | Antenna specification |
| Waterline | Reference Point | Source |
| Kongsberg | WL from origin meters positive down | Kongsberg manual |
| PPS Output | Edge Configuration | Source |
| Applanix POS MV | Falling edge | Applanix manual |
| Seapath | Rising edge | Seapath 320 manual |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Separate TX and RX array offsets for all models except EM2040P, 2040PHS, and possibly 2040C; note that ice-protected systems must be measured on transducer array faces, not ice windows
- EM2040P and PHS (and possibly C) use a single reference point at the center of the combined transducer unit
- Bracket reference point, if applicable; otherwise, alongship position of TX array center and athwartship/vertical positions of RX array center (see Reson spec)
- Applanix POS MV v5 manual (Rev. 4, section 2-8 / p. 44)
- Seapath MRU mounting wizard indicates offsets to target on housing
- Seapath MCG configuration expects the sensing center
- Image provided by WHOI (2021 Atlantis EM124 SAT)
{kind=link}

If survey data are to be referenced to the water level (regardless of later tide correction), then the waterline on the vessel must be measured and configured appropriately in the mapping system reference frame.
The conventions for measuring and configuring waterline vary, and waterline naturally changes with loading and location around the hull. For many applications, it is sufficient to estimate waterline using draft marks or sight tubes and converting these into a 'best-fit' water level around the vessel; this yields the waterline offset at the location required by the mapping system.
For instance, Kongsberg requires the Waterline parameter in meters, positive down from the origin. The example shows a best-fit line through water level measurements taken from surveyed benchmarks around the hull, yielding the waterline offset of +1.80 m at the mapping system origin.
The approach outlined above, translating water levels measured from benchmarks into the mapping system frame, is typically sufficient for deepwater mapping referenced to the water level. However, shallow water configurations may require more detailed waterline estimates with consideration for dynamic draft (if not referenced to the ellipsoid).
The MAC has developed a waterline worksheet intended for Kongsberg installations. This Google Sheet is available for others to use (and provide feedback).
- Make a copy of the (read-only) waterline worksheet
- Follow the instructions to update each field in green with offsets, reference points, and draft readings
- Configure the WL result in SIS under Installation Parameters --> Transducer Setup
- Contact the MAC at mac-help@unols.org with any questions, suggestions, or errors

Manufacturers define axis and sign conventions that must be applied correctly when interpreting survey reports and configuring software. Misinterpretation of these conventions will cause data quality issues that cannot always be addressed in post-processing.
For example, the Kongsberg reference frame convention is presented below.

Axis and sign conventions are presented below for several hardware manufacturers (alphabetical order). All units are meters and degrees unless otherwise noted.
It is always recommended to confirm these conventions with the most recent manufacturer documentation. Sources are linked if publicly available; otherwise, please consult the manufacturer.
| System | +X | +Y | +Z | +Roll | +Pitch | +Heading | +Heave | +Waterline | Source |
|---|---|---|---|---|---|---|---|---|---|
| Applanix | FWD | STBD | DOWN | PORT UP | BOW UP | COMPASS | DOWN | N/A | POS MV V5 Guide (Rev. 4) secs. 2-31, 5-8 |
| iXBlue1 | FWD | PORT | UP | PORT UP | BOW DOWN | COMPASS | N/A4 | N/A | PHINS Manual (Rev. Q) pp. 42-45 |
| Kongsberg | FWD | STBD | DOWN | PORT UP | BOW UP | COMPASS | N/A4 | DOWN5 | EM Installation Manual p. 140 |
| Reson2 | STBD | FWD | UP | PORT UP | BOW UP | COMPASS | N/A4 | UP6 | Teledyne PDS p. 117, Calibration p. 20 |
| Seapath | FWD | STBD | DOWN | PORT UP | BOW UP | COMPASS | DOWN | N/A | MRU 5+ Installation Manual (Rev. 8) pp. 33, 146 |
| Simrad3 | FWD | STBD | DOWN | PORT UP | BOW UP | COMPASS | N/A4 | DOWN7 | EK80 Manual, Transducer Installation |
| Software | +X | +Y | +Z | +Roll | +Pitch | +Heading | +Heave | +Waterline | Source |
| Caris HIPS/SIPS | STBD | FWD | DOWN | PORT UP | BOW UP | COMPASS | (needed) | (needed) | Caris HIPS/SIPS v8.1 manual |
| QPS Qimera | FWD | STBD | UP | PORT UP | BOW UP | COMPASS | DOWN | Draft and HADR8 | Qimera v2.5 manual |
{kind=link}
{kind=link}
- iXBlue alongship (X), athwartship (Y), and vertical (Z) axes are named '1', '2', and '3', respectively.
- Reson conventions may differ between models and documents (e.g., T50 dual-head drawings are +X forward, +Y starboard, Z+ down)
- Simrad rotations are assumed to follow the right-hand rule (as do Seapath and other Kongsberg products)
- Heave sign conventions in a mapping system are generally controlled by the selected attitude input format (e.g., Simrad 3000 or KM binary)
- Kongsberg waterline in SIS is positive down from the origin
- Reson waterline is positive up from the Center of Gravity Point (CGP)
- Simrad EK80 water level is positive down from the origin (i.e., Kongsberg convention; personal communication 2021-05-04 with Kongsberg support, as this is not stated explicitly in Simrad documentation)
- Height Above Draft Reference (HADR) is generated automatically in Qimera's vessel configuration, measured +Z up from the vessel's draft reference point (assumed to be the TX array by default) to the mapping system origin height; in other words, the difference between HADR and measured draft (both measured +Z up from the draft reference) equals the Kongsberg 'Waterline' (+Z down from mapping system origin)
Coordinate systems can be described as 'right-handed' (RH) or 'left-handed' (LH) based on the orientation of the +Z axis from the X-Y plane.

In both cases, you can easily visualize a RH or LH coordinate system using your thumb as +X, pointer finger as +Y, and middle finger as +Z. The only difference is which hand is used; this changes the orientation of the 'Z' finger relative to the 'X' and 'Y' fingers.
Rotations about these axes are typically described by the right-hand rule. After aligning the right-hand thumb with the positive axis, the curvature of the right hand (i.e., the direction that the fingers are pointing) represents a positive rotation about that axis. For instance, aligning the RH thumb with the +X axis (toward the bow) indicates that roll (rotation about X) is positive with starboard side down and port side up.
Most mapping systems use a right-handed coordinate system for linear offsets and follow the right-hand rule for angular offsets. Almost all manufacturers use +X as the alongship axis, positive toward the bow. The difference between manufacturers is typically the orientation of +Z (up or down) and the corresponding change in +Y (to starboard or port); these are still RH systems, simply rotated 180 degrees around the X axis.
Of course, a manufacturer may follow a LH system and apply the left-hand rule, so it is critical to review and adhere to the manufacturer's definitions.