fsm_lo is a ROS package written in C++ that provides LIDAR odometry from measurements of a single panoramic 2D LIDAR sensor, that is: a sensor whose field of view is 360 degrees. fsm_lo is the ROS wrapper of fsm.

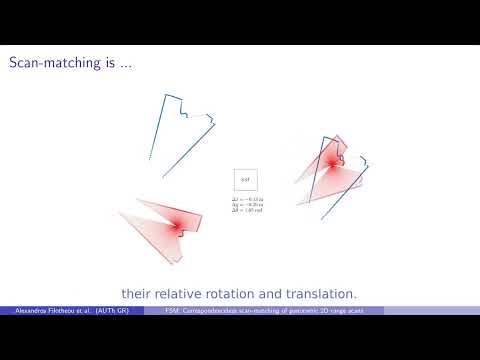
Lidar odometry is achieved via scan-matching but without establishing correspondences between elements of the input scans or their properties, but by leveraging the range signal's periodicity. Hence FSM may exploit properties of the Discrete Fourier Transform, which it does. These two pillars support the robustness of FSM's pose error against (a) sensor noise and (b) distance between consecutive poses, as you can see in the figure that summarises key experiments below.

fsm-lo is installed, launched, and called via Docker:
- if this is your first time running docker then I happen to find this docker installation guide very friendly and easy to follow
- if instead you wish to install and run the package natively then see the INSTALLATION_DEPRECATED.md guide.
Build the image with the most recent code of this repository using compose with
git clone git@github.com:li9i/fsm-lo.git
cd fsm-lo
docker compose buildor pull the docker image and run it with
docker pull li9i/fsm-lo:latest
docker run -it \
--name=fsm_lo_container \
--env="DISPLAY=$DISPLAY" \
--net=host \
--rm \
li9i/fsm-lo:latestdocker compose upLaunching fsm simply makes it go into stand-by mode and does not actually execute anything. To do so simply call the provided service
docker exec -it fsm_lo_container sh -c "source ~/catkin_ws/devel/setup.bash; rosservice call /fsm_lo/start"| Topic | Type | Utility |
|---|---|---|
scan_topic |
sensor_msgs/LaserScan |
2d panoramic scans are published here |
initial_pose_topic |
geometry_msgs/PoseWithCovarianceStamped |
optional---for setting the very first pose estimate to something other than the origin |
| Topic | Type | Utility |
|---|---|---|
pose_estimate_topic |
geometry_msgs/PoseStamped |
the current pose estimate relative to the global frame is published here |
path_estimate_topic |
nav_msgs/Path |
the total estimated trajectory relative to the global frame is published here |
lo_topic |
nav_msgs/Odometry |
the odometry is published here |
| Service | Type | Utility |
|---|---|---|
fsm_lo/clear_estimated_trajectory |
std_srvs/Empty |
clears the vector of estimated poses |
fsm_lo/set_initial_pose |
std_srvs/Empty |
calling this service means: node subscribes to initial_pose_topic, obtains the latest pose estimate, sets fsm's initial pose, and unsubscribes |
fsm_lo/start |
std_srvs/Empty |
commences node functionality |
fsm_lo/stop |
std_srvs/Empty |
halts node functionality (node remains alive) |
Found in config/params.yaml:
| IO Topics | Description |
|---|---|
scan_topic |
2d panoramic scans are published here |
initial_pose_topic |
(optional) the topic where an initial pose estimate may be provided |
pose_estimate_topic |
fsm_lo's pose estimates are published here |
path_estimate_topic |
fsm_lo's total trajectory estimate is published here |
lo_topic |
fsm_lo's odometry estimate is published here |
| Frame ids | Description |
|---|---|
global_frame_id |
the global frame id (e.g. /map) |
base_frame_id |
the lidar sensor's reference frame id (e.g. /base_laser_link) |
lo_frame_id |
the (lidar) odometry's frame id |
| FSM-specific parameters | Description | Default value |
|---|---|---|
size_scan |
the size of scans that are matched (execution time is proportional to scan size, hence subsampling may be needed) | 360 |
min_magnification_size |
base angular oversampling | 0 |
max_magnification_size |
maximum angular oversampling | 3 |
num_iterations |
Greater sensor velocity requires higher values | 2 |
xy_bound |
Axis-wise radius for randomly generating a new initial position estimate in case of recovery | 0.2 |
t_bound |
Angular-wise radius for randomly generating a new initial orientation estimate in case of recovery | π/4 |
max_counter |
Lower values decrease execution time | 200 |
max_recoveries |
Ditto | 10 |
lo_frame_id <- base_frame_id
in other words fsm_lo_node publishes the transform from /base_laser_link
(or equivalent) to the equivalent of /odom (in this case lo_frame_id)
@INPROCEEDINGS{9981228,
author={Filotheou, Alexandros and Sergiadis, Georgios D. and Dimitriou, Antonis G.},
booktitle={2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={FSM: Correspondenceless scan-matching of panoramic 2D range scans},
year={2022},
pages={6968-6975},
doi={10.1109/IROS47612.2022.9981228}}