Using Reinforcement Learning to solve OpenAI's Lunar Lander problem. Checkout the whitepaper for this project.

Create the conda environment with the saved environment file env.yml with the command:
conda env create -f ./env.yml
conda activate envStart the model training with preconfigured configuration:
python ./lander.py
To render the environment while training run:
python ./lander.py ./configs/normal.json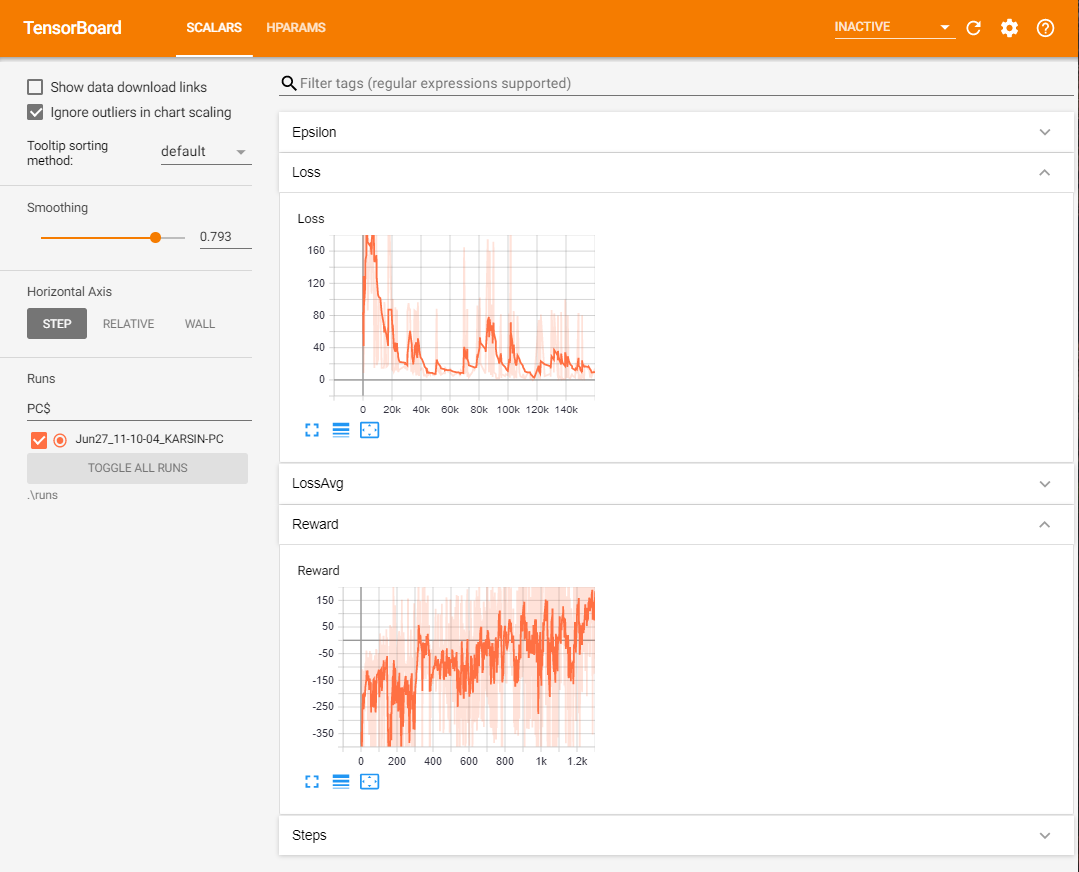
The training event data is recorded with tensorboard and event files is stored in ./runs and after the complete run the model is stored in ./models
The training parameters and configuration are hardcoded in lander.py.
| Config | Description |
|---|---|
| config.Training.Gamma = 0.99 | Gamma parameter |
| config.Training.Alpha = 0.0001 | Alpha parameter |
| config.Training.Epsilon = [0.9, 0.05] | Epsilon parameter |
| config.Training.EpsilonDecay = 20000 | Epsilon decay rate |
| config.Training.BatchSize = 128 | Mini batch size |
| config.Training.MemorySize = 10000 | Replay memory size |
| config.Training.MemoryInitFill = 0.2 | Initial replay memory fill percentage |
| config.Training.TargetUpdate = 10 | Steps before target network update, (1: no target network) |
| config.Training.EpisodeLimit = 750 | Cut the episode after n steps |
| config.HiddenLayers = [100,100] | Hidden layer size for neural network |
| config.Description = "mymodel | Description for the model config |
To monitor the live training data with tensorboard run the following and navigate to https://localhost:8080/
tensorbord --logdir=./runs --port=8080To run a trained model select a model from ./models/ and run playmodel.py as follows
# Path to model Number of episodes to run
python playmodel.py ./goodmodels/dqn.model 100| Path | Description |
|---|---|
| Directories | |
| goodmodels/ | Contains the well trained agents |
| models/ | Directory of trained models |
| runs/ | Directory of tensorboard logdata for each run |
| configs/ | Configurations for different models for training |
| utils/ | Python utility scripts |
| Python Scripts | |
| cartpole.py | Train model for Cartpole-V0 |
| cartpole-working.py | Script for seeded model for cartpole |
| lander.py | Train model for LunaLander-V2 |
| dqn.py | Class for neural network |
| model.py | Classes for model training and configurations |
| replay.py | Class for replay memory |
| playmodel.py | Play trained model |
| plotrun.py | Generate graphs for runs |
| plotmodel.py | Generate graphs for trained agents |
| Misc | |
| env.yml | Conda exported environment |
Happy Lunar Landings!