-
Notifications
You must be signed in to change notification settings - Fork 22
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Merge pull request #4 from eg321/preparing-2.0-release
Preparing 2.0 release
- Loading branch information
Showing
3 changed files
with
233 additions
and
80 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,93 +1,123 @@ | ||
| 3d parts for printing are available id `3d_parts` folder. Available from Thingiverse also: https://www.thingiverse.com/thing:4093205/ | ||
|
|
||
| # Fork changes | ||
| - project ported to Platformio | ||
| - changed 3d parts according to small tube ~16mm | ||
| - added functionality of 3 step motors | ||
| - add current state broadcasting during blinds moving | ||
| - add wipe setting function | ||
| - 2-3 pins for steppers are not reversed now. Please check that initilization of steppers is ok for you (near 86 line: Stepper1(D1, D2, D3, D4)) | ||
|
|
||
| # Latest changes: | ||
| ## 1.4.2 (29 April 2021) | ||
| - Added support for Up / Down mechanical buttons (long press to tune position). Default pins are 22/23 (initialized with INPUT_PULLUP and activated with GND). You can disable that feature with "USE_BUTTONS" macro. | ||
|
|
||
| ## 1.4.1 (14 March 2021) | ||
| - improve MQTT connection reliability. While MQTT hub is unavailable, controller will try to reconnect once per 60 seconds. In this time web interface will be still available. | ||
| - fix update notifications and links. | ||
|
|
||
| ## 1.4.0 (15 September 2020) | ||
| - Support of ESP32 (ESP8266 should work too). It makes possible to easily connect up to 3 steppers with 4-pins connectors. | ||
| - Switched to "CheapStepper" library. It allows to configure rotation speed (grep for "setRpm(30)" lines - maybe you'll need to adapt it for your motors). | ||
| - Code was adapted for asynchronous control of steppers. Your steppers can work in parallel without loosing speed now. | ||
| - Switched to another Wi-Fi library. In general it works like previous "WiFi manager", but supports ESP32 also. | ||
| - Added "STOP" command for OpenHab compatibility. See OpenHab config example below. | ||
| - HomeAssistant support. There are separate MQTT topics for blinds position now (out1, out2, out3). See HomeAssistant config example below. | ||
|
|
||
| ## Non-backward compatible changes: | ||
| - mDNS is not supported now, because used library is not compatible with ESP32. | ||
|
|
||
|
|
||
| # Features | ||
| 1. A tiny webserver is setup on the esp8266 that will serve one page to the client | ||
| 2. Upon powering on the first time WIFI credentials, a hostname and - optional - MQTT server details is to be configured. You can specify if you want **clockwise (CW) rotation** to close the blind and you can also specify **MQTT authentication** if required. Connect your computer to a new WIFI hotspot named **esp-xxxxx**. | ||
| 3. Connect to your normal WIFI with your client and go to the IP address of the device. If you don't know the IP-address of the device check your router for the leases (or check the serial console in the Arduino IDE or check the `/raw/esp8266/register` MQTT message if you are using an MQTT server) | ||
| 4. As the webpage is loaded it will connect through a websocket directly to the device to progress updates and to control the device. If any other client connects the updates will be in sync. | ||
| 5. Go to the Settings page to calibrate the motors with the start and end positions of the roller blind. Follow the instructions on the page | ||
|
|
||
| # MQTT | ||
| - When it connects to WIFI and MQTT it will send a "register" message to topic `/raw/esp8266/register` with a payload containing chip-id and IP-address | ||
| - A message to `/raw/esp8266/[chip-id]/in[1-3]` will steer the selected blind according to the "payload actions" below | ||
| - Updates from the device will be sent to topic `/raw/esp8266/[chip-id]/out` as JSON (there are "out1", "out2", "out3" topics to get separate position of specific blinds) | ||
|
|
||
| ### If you don't want to use MQTT | ||
| Simply do not enter any string in the MQTT server form field upon WIFI configuration of the device (step 3 above) | ||
|
|
||
| ## OpenHab config example | ||
| You can define thing in this way (update "2955439908" with your chip id): | ||
| ``` | ||
| Thing mqtt:topic:livingroom:rollerblinds "Rollerblinds" (mqtt:broker:mosquitto) @ "Livingroom" | ||
| { | ||
| Channels: | ||
| Type rollershutter : rollerblinds1 "Rollerblinds 1" [ stateTopic="/raw/esp8266/2955439908/out", transformationPattern="JSONPATH:$.position1", commandTopic="/raw/esp8266/2955439908/in1", formatBeforePublish="%d"] | ||
| Type rollershutter : rollerblinds2 "Rollerblinds 2" [ stateTopic="/raw/esp8266/2955439908/out", transformationPattern="JSONPATH:$.position2", commandTopic="/raw/esp8266/2955439908/in2", formatBeforePublish="%d"] | ||
| Type rollershutter : rollerblinds3 "Rollerblinds 3" [ stateTopic="/raw/esp8266/2955439908/out", transformationPattern="JSONPATH:$.position3", commandTopic="/raw/esp8266/2955439908/in3", formatBeforePublish="%d"] | ||
| } | ||
| ``` | ||
| *Russian version available [here](README_ru.md)*. | ||
|
|
||
| ## HomeAssistant config example | ||
| Most probably I'll add auto-discovery later. Right now you can add blinds in this way (update "2955439908" with your chip id): | ||
| ``` | ||
| Hi there! | ||
|
|
||
| This project aims at controlling of motorized blinds, and it's integration into home automation systems like [Home Assistant](https://www.home-assistant.io/) and [OpenHab](https://www.openhab.org/). | ||
|
|
||
| The project developing in 2 areas: | ||
| 1. Software part (firmware for boards based at ESP8266 / ESP32 modules) | ||
| 2. Mechanical part (3d printing models to convert your blinds into motorized one). | ||
|
|
||
| A bit details below... | ||
|
|
||
| # ESP8266 / ESP32 firmware | ||
| I'm trying to keep compatibility with both platforms. | ||
| Main differences between them: | ||
| - There is fewer pins available at ESP8266. You can connect 2 steppers to single controller only (using 8 pins). | ||
| - ESP32 can connect up to 4 steppers (or even more?) to single controller (using 16 pins). | ||
|
|
||
| If you would to connect 1 or 2 steppers only, use cheaper ESP8266 based controller (like Wemos D1 mini, NodeMCU, etc). | ||
|
|
||
| ## Features | ||
| - Support for cheap 28BYJ-48 steppers (better to use 12 volt versions) | ||
| - Control of an unlimited number of steppers (limitation in 4 motors is the default for a more convenient UI). In fact, it's limited by hardware only (by the number of pins). | ||
| - Ability to set the rotation speed (12 volt motors can provide a higher speed) | ||
| - Ability to set all main settings through Captive WiFi Portal (steppers used, pins, rotation speed, MQTT settings, etc.) | ||
| - Web interface for setting endpoints and controlling blinds (adapted for mobile devices also) | ||
| - Possibility of connecting an external mechanical switch (with the ability to stop the curtains in the desired position). | ||
| - MQTT support (both for controlling curtains and for setting end positions - can be complete replacement for Web UI) | ||
| - Easy integration with popular home automation systems like [Home Assistant](https://www.home-assistant.io/) or [OpenHab](https://www.openhab.org/) (via MQTT) | ||
| - Over the air (OTA) updates. No need to disconnect or disassemble the controller to update the firmware. The web interface notifies about the availability of new updates. | ||
| - Saving the position of each blind in the ROM (you do not need to re-calibrate or set the position after turning off the power) | ||
| - Control of all connected motors in parallel (asynchronous operation with steppers) | ||
| - Watchdog (automatic restart of the controller in case of freezing) | ||
| - Automatic MQTT re-connection in case of network problems | ||
| - Low power consumption when idle (stepper windings are switched-off when idle) | ||
| - DHCP over WiFi support | ||
|
|
||
| ## Web-interface | ||
| Control blinds: | ||
|
|
||
| <img src="https://user-images.githubusercontent.com/10514429/127761354-48f777a2-bae6-4e8f-9864-e677d7ff6fbc.png" width=60%> | ||
|
|
||
| Set end-points: | ||
|
|
||
| <img src="https://user-images.githubusercontent.com/10514429/127761394-7f7a63c1-fb19-48bf-a2b4-b94497d89f7c.png" width=60%> | ||
|
|
||
|
|
||
| ## MQTT | ||
| *Just do not setup MQTT details at Captive Portal, if you don't want to use MQTT.* | ||
|
|
||
| MQTT details: | ||
| - All controllers send a message to the common topic after successful connection: `ESP_Blinds/register` (in JSON with 2 fields: `chipId` and `ip`) | ||
| - Controller listening for commands at topic `ESP_Blinds/<chip_id>/in` (JSON) | ||
| - Controller send updates with state and positions to `ESP_Blinds/<chip_id>/out` (JSON) | ||
| - Separate topics for steppers (`/outN`) are disabled for MQTT messaging optimization, but you can enable it if needed for your automation flow. | ||
|
|
||
| ## HomeAssistant integration | ||
| *Auto discovery is disabled now due testing issues. Will be enabled in future releases.* | ||
|
|
||
| <img src="https://user-images.githubusercontent.com/10514429/127761434-6b5441d2-5204-49c0-a82d-9eed0a084a33.png" width=60%> | ||
|
|
||
|
|
||
| Config example for 2 roller blinds (replace "_chip_Id_" with Chip id of your controller, watch it at registration topic - `/ESP_Blinds/register`): | ||
| ```yaml | ||
| cover: | ||
| - platform: mqtt | ||
| name: "Rollerblind 1" | ||
| command_topic: "/raw/esp8266/2955439908/in1" | ||
| set_position_topic: "/raw/esp8266/2955439908/in1" | ||
| position_topic: "/raw/esp8266/2955439908/out1" | ||
| payload_open: "0" | ||
| payload_close: "100" | ||
| payload_stop: "STOP" | ||
| name: "Blind 1" | ||
| device_class: "blind" | ||
| command_topic: "ESP_Blinds/_chip_Id_/in" | ||
| set_position_topic: "ESP_Blinds/_chip_Id_/in" | ||
| set_position_template: '{"num": 1, "action": "auto", "value": {{ 100 - position }} }' | ||
| position_topic: "ESP_Blinds/_chip_Id_/out" | ||
| position_template: '{{ value_json.position1 }}' | ||
| payload_open: '{"num": 1, "action": "auto", "value": 0}' | ||
| payload_close: '{"num": 1, "action": "auto", "value": 100}' | ||
| payload_stop: '{"num": 1, "action": "stop", "value": 0}' | ||
| position_open: 0 | ||
| position_closed: 100 | ||
| optimistic: false | ||
|
|
||
| - platform: mqtt | ||
| name: "Blind 2" | ||
| device_class: "blind" | ||
| command_topic: "ESP_Blinds/_chip_Id_/in" | ||
| set_position_topic: "ESP_Blinds/_chip_Id_/in" | ||
| set_position_template: '{"num": 2, "action": "auto", "value": {{ 100 - position }} }' | ||
| position_topic: "ESP_Blinds/_chip_Id_/out" | ||
| position_template: '{{ value_json.position2 }}' | ||
| payload_open: '{"num": 2, "action": "auto", "value": 0}' | ||
| payload_close: '{"num": 2, "action": "auto", "value": 100}' | ||
| payload_stop: '{"num": 2, "action": "stop", "value": 0}' | ||
| position_open: 0 | ||
| position_closed: 100 | ||
| value_template: "{{ value | int }}" | ||
| optimistic: false | ||
| ``` | ||
| Use same approach for other your blinds. | ||
| # Mechanical part | ||
| The most popular option uses cheap 28BYJ-48 steppers, but in fact you can use any 4-pin stepper motors (dual winding steppers). | ||
| 28BYJ-48 is most often used with the ULN2003 driver (better to use 12 volt version, it gives more torque). | ||
| I have developed 2 models for converting Leroy Merlin' roller blinds into motorized ones: | ||
| 1. for the old models. It looks like they are almost not sold anymore. | ||
| 2. for a new (will publish soon). The fixing holes match the original parts, so the curtains can be easily converted to motorized and vice versa. | ||
| ## Payload options | ||
| - `update` - send broadcast message about current state via MQTT and websockets | ||
| - `0-100` - (auto mode) A number between 0-100 to set % of opened blind. Requires calibration before use. E.g. `50` will open it to 50% | ||
| 3 printing models are available at `3d_parts` directory or at [Thingiverse](https://www.thingiverse.com/thing:4093205/) directly with some instructions. | ||
|
|
||
| # Screenshots | ||
| # Future plans | ||
| * Complete implementation for Home Assistant "Auto Discovery" | ||
| * Add support for other steppers and drivers (please propose at "issues") | ||
| * Add more configuration options at WebUI to allow re-configuration without "wipe settings" | ||
| * Prepare universal PCB | ||
| * Any ideas? Fill in the Issues. | ||
|
|
||
| ## Control | ||
|  | ||
| # Project history | ||
| This project appeared as fork of @nidayand [repository](https://github.com/nidayand/motor-on-roller-blind-ws) originally. | ||
|
|
||
| ## Calibrate | ||
|  | ||
| Unfortunately, the project supported ESP8266 and 1 stepper only, plus it had not been updated for a long time. I added support for Platformio (for easier development), multiple steppers, and ESP32 later (so more than 2 steppers can be connected to single controller). It was published as v1.4.x. | ||
|
|
||
| ## Communication settings | ||
| 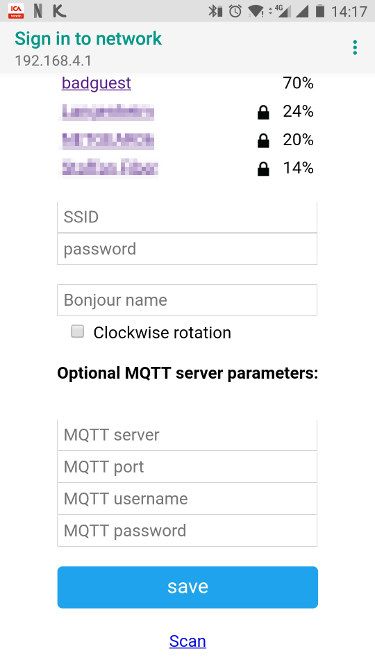 | ||
| Soon I wanted a more convenient motor control, a simple controller configuration without firmware re-build, but the original code was of little messy to maintain, although it worked. | ||
| As a result, a large refactoring of the firmware took place - new classes and areas of responsibility were allocated. | ||
|
|
||
| ## Sidebar | ||
|  | ||
| In fact, it became clear that almost nothing remained of the old project (only the Web UI almost unchanged). This project was detached and now developing on its own tree. |
Oops, something went wrong.