
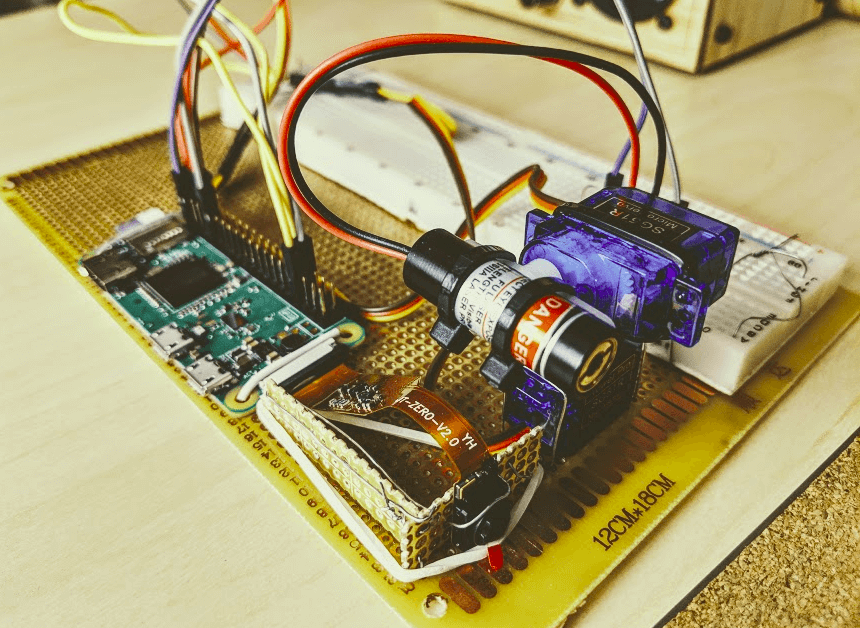
A laser dot runs away from a cat using an RPi camera, a laser, and two servos.
Algorithm demo.
What the program does:
- detects the cat movement using an RPi camera
- calculates required laser dot position to be kept away from the cat
- moves the laser mounted on top of two servos (X and Y axes)
- streams a debug video over HTTP (MJPEG).
raspi-config
# ---> 5 Interfacing Options
# ---> P1 Camera Enable/Disable connection to the Raspberry Pi Camera
# ---> Yesmake build # produces build for RPi(ARM)bin/rpi-laser-cat-teaserOptions:
$ ./bin/rpi-laser-cat-teaser --help
Usage of ./bin/rpi-laser-cat-teaser:
-camera-flip-h
flip camera image horizontally
-camera-flip-v
flip camera image vertical
-camera-fps int
camera fps (default 24)
-camera-scale int
camera resolution scale (128*scale x 96*scale) (default 1)
-debug
print fps to output
-detector-blind-spot-radius int
detector blind spot radius (to prevent self-detection) (default 10)
-detector-threshold int
detector sensitivity threshold (default 7500)
-follow
laser stays on run away radius
-ramdom-amplitude float
laser random movements amplitude [0.005-1] (default 0.02)
-random-interval int
laser random movements interval in seconds (0 to disable) (default 2)
-run-away-radius float
laser run away radius as percent of width [0-1] (default 0.5)
-servo-flip-x
flip servo x position calculation
-servo-x-max int
servo x max angle pulse length ~[20-120] (default 97)
-servo-x-min int
servo x min angle pulse length ~[20-120] (default 74)
-servo-flip-y
flip servo y position calculation
-servo-y-max int
servo y max angle pulse length ~[20-120] (default 75)
-servo-y-min int
servo y min angle pulse length ~[20-120] (default 56)
-stream
stream debug image
-stream-port string
stream port, url: IP:PORT/stream) (default "8081")
-version
print version- assemble servo controller
- order potentiometer
- control servo software
- move with servo controller
- move with RPi PWM (?)
- calibrate servos
- laser
- movement mechanics
- camera software
- connect camera to RPi
- read image
- movement detection
- run away algorithm
- pair servo and camera software
- power
- calculation and experiments
- order batteries case
- case design
- order case
- fit component
- final assembling
# to run same configuration as the image above has
rpi-laser-cat-teaser -servo-flip-x -servo-flip-y -camera-flip-h -camera-flip-v -stream