EKF2 offboard position control doesn't work with px4 firmware 1.9.2 #12476
Labels
Comments
|
This issue has been automatically marked as stale because it has not had recent activity. Thank you for your contributions. |
|
Also mentioning @Jaeyoung-Lim. |
|
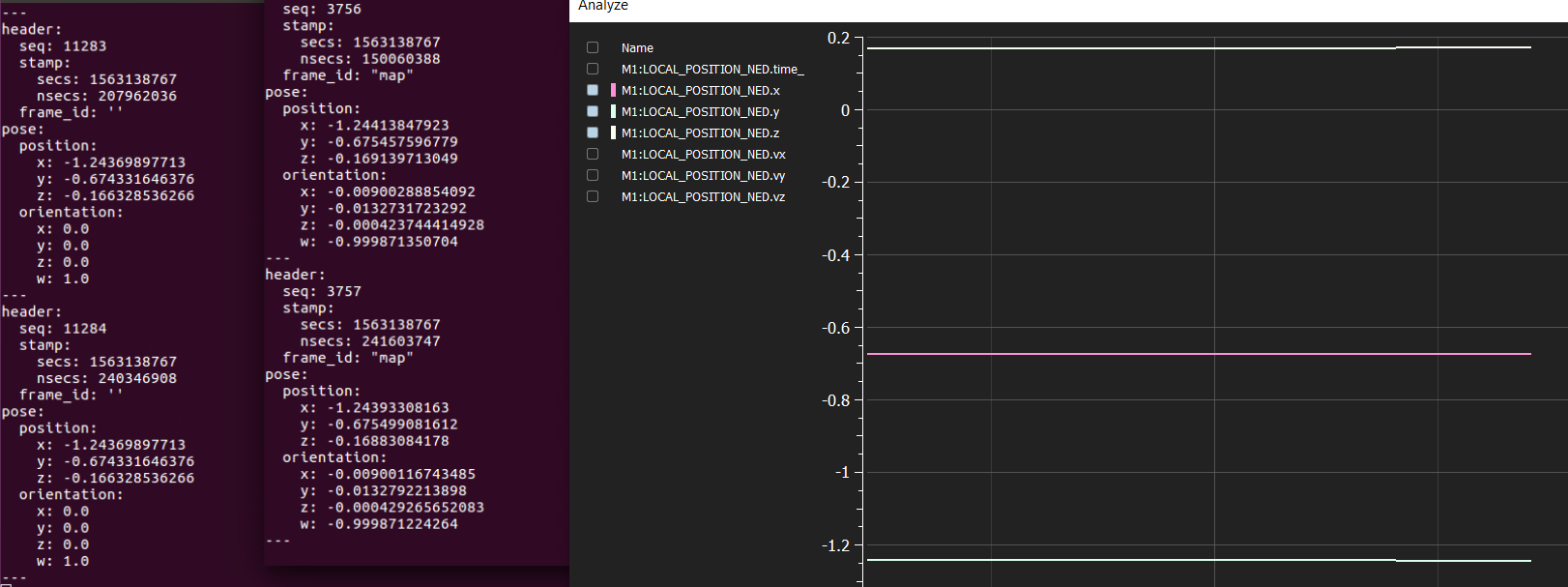
@EvanAndE I believe this is not a problem related to offboard control, but more likely that the external vision input you are providing leads to a wrong estimated position of the vehicle. Have you checked all the frames and |
|
This issue has been automatically marked as stale because it has not had recent activity. Thank you for your contributions. |
|
No answers, closing |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Expected behavior
The goal is to do offboard position control, simply to make the quad take off from the groud to a set point (0,0,0.5) and hover. But it failed.
Log Files and Screenshots
https://dev.px4.io/v1.9.0/en/ros/external_position_estimation.html
The .ulg file is shown here.
https://logs.px4.io/plot_app?log=e9b8b3cb-be93-4ef5-973c-5f1e553b19a3
and it has the same results and can not hold position. I tuned the yaw rate controller PID, roll and pitch controller PID and they are fine. But I don't know whether this is a firmware issue or I need to tune the position controller PID.
The text was updated successfully, but these errors were encountered: