This FAQ has been written from the perspective of using a Windows PC as host, not e.g. a tablet.
The FAQ is currently split in four sections: general, Word Blocks specific, and Python specific questions. The last section is on advanced topics.

I opened the box, and one of the first things I did was to power on the brick. However, I could not figure out how to switch it off.
You have to first download the LEGO app (next question) on your PC and then upgrade the Hub OS. Only then I was able to switch the hub off. Upgrading OS only works from PC (probably MAC also works, but phone and iPad probably don't) .
How to switch off? Keep the big button pressed, it gives three beeps, and then you can release. In some cases (Python program running instead of a Word Block) I do not hear the three beeps.
Here is a demo on YouTube
The booklet in the mindstorms box tells you to visit https://www.lego.com/devicecheck. I skipped that, because I have a brand new PC and a brand new Android device, so no need to check... But then I wondered where should I download the Mindstorms app?
Well, go to devicecheck, select mindstorms, and click on one of the "stores" to download the app.

Instead of the Mindstorms app, you might like to try the Spike prime software. It seems identical, and it has support for the force sensor, which is missing in the Mindstorms app. Did not try.
This "app" is what is normally known as an IDE (integrated development environment). It is an editor, compiler, uploader, debugger and help system in one. But LEGO calls "the app".
I have the feeling that the app updates itself, because sometimes the version number in the titlebar changes. However, you not always have the latest-greatest, the update is "slow". To force an update goto the Windows Store, search for the LEGO Mindstorms app, and press update.
I don't like "apps" from the Windows store. They are special in all kind of ways. For example how do you create a shortcut on your desktop?
Go to Start > Run (e.g. Windows-R) and enter shell:AppsFolder.
This pops up a folder with apps, and you can drag a shortcut to e.g. your Desktop.

Found here.
In the LEGO app, goto to Help > Settings > General and click the "Welcome Robot Inventors!".
LEGO has leaflets on Spike prime, which is largely the same as Mindstorms Robot Inventor.
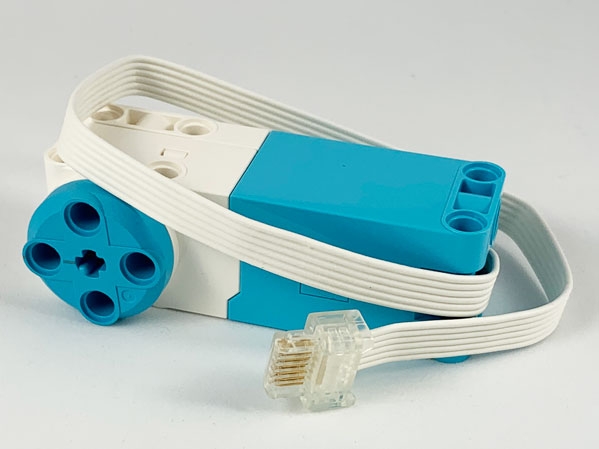
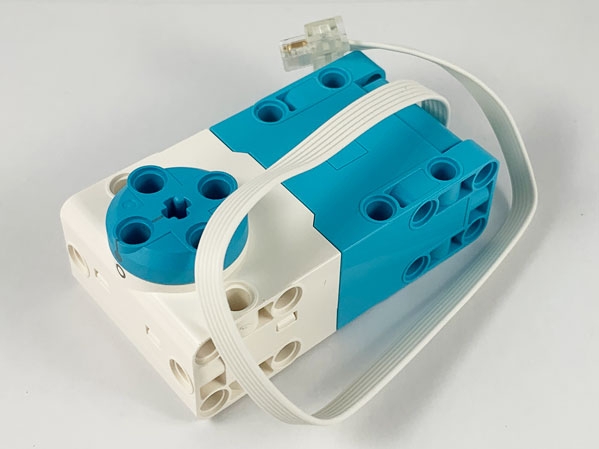
- hub: 5x5 LEDs, 6 ports, gyro, 3 buttons, one with RGB LED, beeper, Bluetooth, USB, MicroPython
cpu: 100MHz M4, 320 kB RAM, 1M FLASH; 32MB RAM extern
battery: 2100 mAh @ 7.3 V >500 cycles - color sensor: 100 Hz sample rate, color sensing (RGB/HSV), reflectivity sensing, ambient sensing, white LED emission
- distance sensor: 100 Hz sample rate, range 50..2000 mm, resolution 1 mm, 4 LEDs for decoration
- motor: torque 0..18 Ncm, speed 0..185 RPM, current 110..800 mA;
rotation sensor: 360 ticks per revolution, 3 degrees accuracy, 100 Hz sampling
The standard Robot Inventor firmware for the hub has slots for 21 programs. Slots 0..19 store user programs (either WordBlock or Python). There is one special slot, it is reserved for a (fixed) test program. The left and right buttons on the hub "walk" throught these slots. The user slots show the number 0..19 on the hub's display, the test slot shows a play symbol (triangle). The Spike Prime shows a heart instead of a play symbol.

The program in a slot is activated by pressing the center button (center button LED switches from gray to white).
- When the test program is running, we see a LED light up for each of the six ports.
- When we plug in an "actuator" (e.g. motor, or 3x3 LED matrix), an animation shows up "pushing data out of the port".
- When we plug in a "sensor" (light, distance, force), an animation shows up "pulling data from the port".
- When we have one (or more) actuator(s) plugged in, the left and right buttons on the hub decrease respectively increase the drive level (power) for the actuator(s) - this allows testing actuators.
- When we have one (or more) sensors(s) plugged in, the more the sensor is "excited" the longer the aninated bar on the hub - this allows testing sensors.
- There is one more feature: we can connect a sensor and an actuator on opposite ports (A and B, or C and D or E and F).
In this case, the test firmware maps the sensor input to actuator output.
- The harder you press the force sensor the faster the motor rotates.
- The shorter the distance measured by the distance sensor, the faster the motor goes.
- If color c is detected by the color sensor, the motor is switched to speed 10×c.

Yes, LEGO is publishing instruction videos on YouTube. Unfortunately not on a separate channel or in a playlist (grr). These I found (top-most is oldest). First, a teaser and later the introduction
- Designer Video 2020 Oct 17
- Robot Inventor Explained! 2021 Feb 3
Next, several instruction videos.
- Connect Your Hub 2021 May 18
- Your First Program 2021 May 19
- Navigate Your Hub 2021 May 20
- Turn your Devices Into a Remote Control 2021 May 21
- Create Animations 2021 May 22
- Edit Your Programs 2021 May 23
- Connect a Game Controller 2021 May 24
- Make Your Models Come Alive 2021 May 25
- Program Your Sensors 2021 May 26
Then, more than a year later more (advanced) videos.
- Hub to Hub 2022 Aug 14
- Machine Learning – Audio 2022 Aug 14
- Machine Learning – Image 2022 Aug 14
- Virtual Remote 2022 Aug 14
- Python 2022 Aug 14
- python readthedocs from Nard Strijbosch
- python API from LEGO
The differences between Mindstorms Robot Inventor and Spike Prime are big and small, depending on what is relevant for you
-
Spike Prime is for education, Robot inventor is consumer oriented.
-
Spike comes in a sturdy classroom-safe plastic storage box, Inventor in a carton box.
-
Also the set of bricks reflects the different target markets: Spike Prime has 520 colorful and easy to use (read: more LEGO system instead of LEGO technic) parts whereas Robot Inventor has 949 black/white/greenish technic parts. Spike does have some creative parts
- system bricks with technic holes
- castor wheel
- two minifigs
-
There are more but simpler models for Spike Prime (need to be done in class in an hour).
-
Selection of motors is different: Spike has 2 medium motors and 1 Large motor, Inventor has 4 medium motors.
-
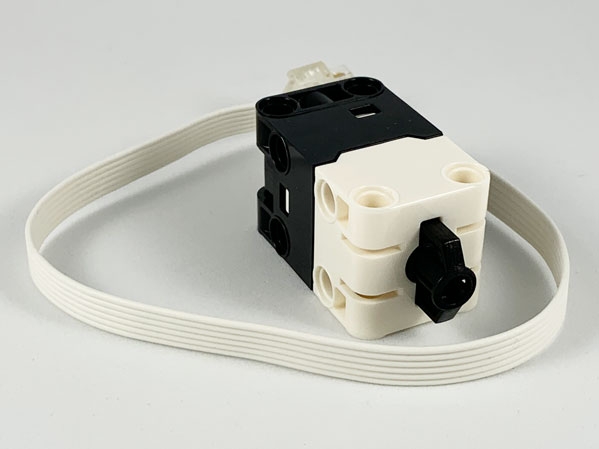
Selection of sensors is different: both have an ultrasonic distance sensor and a color, Spike has an additional touch sensor (which is force sensitive).
-
Both support Word Blocks and Python to program your robots. Spike also supports Icon Blocks.








This looks like a lot of differences, so why would you say Spike is not different from Robot Inventor?
-
They use the same hub.
-
They have the same electrical system ("electrical plug"). It was originally known as "LEGO Power Functions 2.0", but was later renamed to "LEGO Powered Up". It is also used in "LEGO WeDo 2.0", "LEGO BOOST", "LEGO City and Duplo Trains".
-
The Robot Inventor hub can be changed into a Spike hub by flashing it with the Spike firmware. Just install the SPIKE LEGO Education app, connect the hub, and you are asked to replace the firmware (this does take over a minute).


Of course, there are the five robots that come with the box. Building instructions are digital only, you can find them in the app via Help > Settings > Building instructions. Or you can click the robot in the home screen, and go from there in smaller steps. Alternatively you can download them as pdf.
Do note that the robots come with add-ons, which are really great, for example Charly drum master or Tricky chain reaction
If you like more, or simpler builds, you could have a look at Spike prime instructions or alternative link.
There are several nice community builds.
- Over 75 robots
- Over 35 videos of building instructions
- MOCs at rebrickable
- Ox
- Self balancing bike
- Rock paper scissors
- Robot arm
Instructions Version 2 - Canadarm (gripper hint)
- Candy sorter
- F1 race car
- Tic tac too
- Clock
- Steam lococomotive
- Airplane
- Scooter
- Balancing Robot
- Self uprightinh balancing robot
- Cube solver
- Cube solver from MindCuber
- Writing machine
- R5D1 robot
- HugBot
- AI brick sorter
- 4 legged walker
- Several Technic MOCs using robot inventor
When you start the LEGO Mindstorms Robot inventor app, you get a screen with pictures (links) to the 5 robots. At first this is nice, but after a while you want to continue with your own projects.

You have to click PROJECTS at the bottom of the app's home screen. Unfortunately, the list of projects starts with the standard LEGO ones, and not with e.g. the most recent ones. You have to scroll all the way down. This is much improved since version 10.2.0!
The mouse scroll wheel does work, but the scroll bar itself is too thin to easily grab with the mouse. Grr.
The LEGO app is very limited in using keys. The DownArrow (or UpArrow) don't work. Fortunately PageDown and PageUp do work, best is probably End (or Home). Unfortunately, you first have to click the project list (to give it focus) and make the keys work. Grr.
Most projects end up with a name like Project 17, because the LEGO app does not ask for a name.
By default it just numbers them, using the lowest free number.
You have to explicitly remember to press File > Save As (preferably right after you create a new project).
Update: When starting a new project, you can now edit the name in the dialog.

Want to start a new project? Press CODE at the bottom of the home screen. You get an empty new Word Block program. Rather have a Python program? In the Word Block editor (top) create a new tab. Or, in the home screen click File > New Project.
Now you are asked for the type of project (Word Block or Python).
After creating the project I suggest to immediately rename with File > Save As.
There is no Save button.
It seems the project is saved constantly when you interact with it (clicking the tab is enough). I see the time stamp change in the file explorer.
The only condition is that the project is non-empty, or that you did a Save As. So, only an empty project that is not yet renamed does not get saved, which makes sense.
The LEGO app made a directory C:\Users\maarten\Documents\LEGO MINDSTORMS for my (Maarten's) projects.
If you Save As xxx, the file ends up there, as xxx 1.lms.
The extension lms probably refers to LEGO MindStorms. The "space-one" suffix is automatically appended.
The next time you Save As a project and type xxx it gets the name xxx 2.lms (note the 2).
Non-standard windows behavior. Grr.
You can however Save As and select the existing xxx 1.lms.
That pops up an "are you sure you want to overwrite" dialogue.
It also means you can't call your program beep3, because the LEGO app gets confused by the 3,
strips it and appends a space and another number. grr.
To charge the hub, use a USB charger (not supplied by LEGO) and the provided USB cable (standard-A to micro-B).
LEGO recommends using a so-called DVP (dedicated charging port) or CDP (charging downstream port) charger. Standalone chargers from a known brand (Samsung, Apple) or USB ports from new laptops typically have that type. Charging from these ports takes about 2 hours.
Cheaper chargers have type SDP (Standard Downstream Port) and then charging takes 5 hours.
While charging, the LED next to the micro USB port is red. Once the battery is fully charged, that LED turns green.
You can check the battery status also in the app. When the hub is connected click the "Open Hub connection" icon in the upper right corner. The top-left then shows the battery status.

It seems that reported battery levels are 100%, 80%, 60%, 40%, 20% and 10%.
You can rename your Hub. When the hub is connected click the "Open Hub connection" icon in the upper right corner. A new pane pops up, and the upper right corner has a hub menu (three dots)

There click Rename Hub.
It seems that if you use the hub via Bluetooth, you must unpair it (to clear the Bluetooth cache of named devices).
When you start the hub, the center button/LED is a dim gray (on, but "dark white"). This means the hub is idle, and the user (you) can interact by pressing the left or right button to select a program (one of twenty of your own, or the built-in "play" program). A click on the center button starts the selected program (it starts running).
When a program is running, the center button is bright white. When the program stops, either by executing "stop [and exit program]" or by a press on the center button, the center button is dim gray again.
When the program encounters a bug (e.g. "sqrt of -5"), the center buttons flashes red. Normally such errors can be fixed easily in your program, if not restart the hub by holding the center button 3 seconds.
If the center button flashes orange, the battery is nearly empty (low charge). Charge the hub.
It seems that the center button can turn green - probably a lost connection (restart by holding the center button for 3 seconds).
It seems that blue means the hub requires a firmware update.
See spike prime faq.
An llsp file is presumably the same as an lms file.
The only difference seems to be that an lms is for Robot Inventors app and the llsp is for the Lego Spike Prime app.
Like the lms file, it is an archive with an icon, manifest and code file.
Yes you can. Here I show it for Windows to Android.
Suppose we have a program in the Windows app. We give it a clear name, e.g. UltrasonicLedtest.

You could use File>Share>Email, but let's go the old style.
Close the LEGO application and browse to your project directory.
For me that is C:\Users\maarten\Documents\LEGO MINDSTORMS.
Here we find UltrasonicLedtest.lms.

Fire up the mail program, attach the file UltrasonicLedtest.lms, e.g. by dragging it to the mail, type a subject and maybe a body.
Most importantly, in the To: field enter an email address that you can open on your mobile.

Hit send. We now switch from PC to the mobile.
On the mobile open the mail program and open the mail we just send.
Note the attached UltrasonicLedtest.lms.

Press the download botton. After the download open the downloaded file. On my phone a downloaded file is shown in the notification area, and I can just tap it there. Alternatively, use a download or file manager to go to the download folder and open it there. When you try to open it, Android asks which app to use.

We select MINDSTORMS. In the LEGO app, on the home page select PROJECTS.
We find our shared UltrasonicLedtest.lms.

When we open it, it is ready to run or be edited.

Yes you can. Here I show it for Android to Windows.
Suppose we have a program, e.g. TwoBlocks.lms open in the mobile app.

We go to the home page (press "home" icon in upper left corner) and then go to the PROJECTS.
We search for TwoBlocks.lms and long press it.

A context menu pops up, and we select Share.

A share menu pops up and we select mail.
The TwoBlocks.lms file is attached.
Enter a subject and maybe a body.
Most importantly, in the To: field enter an email address that you can open on your PC.

Hit send. We now switch from the mobile to the PC.
On the PC open the mail program and open the mail we just send.
Note the attached TwoBlocks.lms.

Open a file explorer and drag the attachment TwoBlocks.lms. to the mindstorms directory.
For me that is C:\Users\maarten\Documents\LEGO MINDSTORMS.

Fire up the LEGO Mindstorms application on your PC.
You will not yet find the TwoBlocks.lms in PROJECTS. Rather chose File > Open.

Select TwoBlocks.lms and press open.

After we opened it, it is ready to run or be edited.
I see people talk about hub firmware updates, but the Mindstorms app does not have a feature for that - at least I couldn't find it. Maybe the Spike prime app allows explicit firmware updates (downgrades, alternatives...).
However, when LEGO releases a new version, you will get a message in the app. If you accept it the hub will be updated. This updates the hub’s OS, not the user data (saved projects).
You can also reset the hub; I believe it removes all user data, but leaves the firmware as-is. When the hub is connected click the "Open Hub connection" icon in the upper right corner. A new pane pops up, and the upper right corner has a hub menu (three dots)
There click Reset Hub.
By the way, if you open a serial port to the Python REPL (see other question), and press ^C you stop the run-time (?). If you then close REPL and start the LEGO mindstorms app, it believes the hub firmware is broken and suggest to flash it again. You could do that. You could also just powercycle the hub (or press ^D for soft reset while still in REPL).
There are multiple versions
- The app version is in the title bar.
- The Hub has an OS, its version is shown in the Hub Connection window.
- For Python we use a script
import sys print(sys.implementation) print(sys.version)
The following sections say "Per", that is the date I recorded the version, not they date that version was released (between brackets, my guess).
- The app version is 10.5.0
-
New firmware for the hub
-
The light sensor can be set to ambient (More Sensors)
-
The "device type" of a plugged in device (e.g. 62 for Ultrasonic Sensor)
-
The "Remote Control" via the IDE now allows displaying values

-
Create new project allows to enter a project name

-
Python is no longer tagged as "beta"
-
- The Hub OS version is 3.2.36 (1.5.6.0)
- The
sys.implementationmicropython 1.14.0, mpy 517 - The
sys.version3.4.0

- I have no idea why it says spprime (did I do that when trying spike prime?)
- The menu has "debug" because I switched that on (see "Can I have a peek under the hood")
- There is suddenly a new version number (1.5.6.0).
- The app version is 10.4.0
- Help Center now has the instruction videos (from Youtube) [is that new?]
- Help Center now has topics 'The App' and 'The Hub' [is that new?]
- There are many (13) new community contributions (note that some require two sets):
LightPlane, Course Bot, Lilly,
Swipe it, Neptunian, Dance Class I,
Dance Class II, Balancing Bot I, Balancing Bot II,
Color Catcher I, Color Catcher II, Shuttle Simulator I,
Shuttle Simulator II, Exploration Rover, Sea Turtle,
Melody Maker, Pet Gelo, Tricky Flippin',
Salamoot, Print and Scan, Wrecking Bot - New Word Block extensions
- More sensors is extended

- LEGO powered up
- Two new Experimental: Machine Learning and Hub to Hub Communication
- More sensors is extended
- The "Bug in Robot Inventor Debug blocks" (see question below) is not fixed :-(
- The Hub OS version is 3.2.29
- The
sys.implementationmicropython 1.14.0, mpy 517 - The
sys.version3.4.0

- The app version is 10.3.1
- I did not notice any changes
- The Hub OS version is 3.1.43
- The
sys.implementationmicropython 1.14.0, mpy 517 - The
sys.version3.4.0
- The app version is 10.3.0
- Getting started on home page

- Bluetooth auto connect

- Getting started on home page
- The Hub OS version is 3.1.43 (no fourth number)
- The
sys.implementationmicropython 1.14.0, mpy 517 - The
sys.version3.4.0



- The app version 10.2.0
- It now asks for age and consent to collect data.
- Help Center is updated
- My projects is now easier to work with
- It seems there is hub-to-hub communication (see Tips & Tricks in the Help Center)
- The Hub OS version is 3.1.29 (no fourth number)
- The
sys.implementationmicropython 1.14.0, mpy 517 - The
sys.version3.4.0

All version numbers are the same as per May 16, but there are now eight community fan inventions: Exploration Rover, Sea Turtle, Melody Maker, Salamoot, Print and Scan, Wrecking Bot, Pet Gelo and Tricky Flippin'.

- The app version 10.1.0
In main menu, SETTING is replaced by COMMUNITY, which lists five robots: Exploration Rover, Sea Turtle, Melody Maker, and two that were previously extensions: Pet Gelo and Tricky Flippin'. Some users report three more: Salamoot, Wreckin' Bot, Print and Scan. - The Hub OS version is 3.1.7.2
- The
sys.implementationmicropython 1.12.0, mpy 517 - The
sys.version3.4.0

- The app version 10.0.3
Now has a "Getting started".
Now has motor calibration (that O is 0 degrees).
Now has robot (extensions) from the community. - The Hub OS version is 2.1.4.13
- The
sys.implementationmicropython 1.11.0 - The
sys.version3.4.0
- The app version 10.0.2
- The Hub OS version is 2.1.4.10
- The
sys.implementationmicropython 1.11.0 - The
sys.version3.4.0

- The app version is 4.0.4-dev.99999
- The Hub OS version is 2.1.4.10
- The
sys.implementationmicropython 1.11.0 - The
sys.version3.4.0


I have picked up two from social media, and later found I suffer from both.
The first is the worst: some color sensors are broken. I found it here and later here. The one that came with the 51515 box is fine. But I ordered a second one. If I plug it in the hub, it is sometimes recognized, and sometimes not. Recognized means that it lights up, appears in the play (triangle) test app, and is listed in the LEGO app under the port. For my second sensor none of these happen (in "half" the time).
Update: I contacted LEGO support and they claim that with the latest firmware this is resolved.
The second issue is less of a problem: the O positions of the motors have a deviation. I found it here. If you handposition the motor to O, its position is not returned as 0 (but ~5). If you tell the motor to go to position 0, it is not at O, but some degrees off. Most motors have a deviation within ±5°, but one of mine has an offset of nearly 15°. The good news is that it is structural, so you can compensate in software.
Update: the LEGO app version 10.0.3 has a calibration procedure that presumably programs the O correction in the motors.
To force a motor update, goto the Hub connection, and find the "Update motors" in the overflow menu. You need the LEGO app version 10.0.3 or higher.

I know of one that forces the hub in Device Firmware Update (DFU) mode:
- Connect hub with USB to PC.
- Turn off the hub by keeping the center button pressed (~3sec).
- Unplug the USB cable from the hub (leave PC side connected).
- Press and hold the Bluetooth button on the hub
- While holding the button, reconnect the USB cable.
- Wait till center button starts flashing colors (purple, green, blue).
However, the LEGO app does not recognize this DFU mode but eg pybrick does (don't worry, just switch off the hub to get it out of DFU mode).
It seems that a lighter approach does work with the LEGO app:
- Connect hub with USB to PC.
- Turn off the hub by keeping the center button pressed (~3sec).
- Press and hold the left button and press the center button.
- Release both buttons when the hub is powered on.
- When you press connect in the LEGO app, the hub OS will be updated.
I think LEGO did a bad job here. Many functions are not operatable by key. Probably LEGO aims at touch screens.
Note #=shift, ^=ctrl, @=alt
Word blocks is horrible, there are basically no hotkeys.
- ^Z for undo is working, but ^Y for redo isn't (it is available in bottom menu or right click menu)
- @F4 stops application.
- @F or @H (for file or help menu) is not working.
- Cut and paste (^C, ^V) is not working. You can right-click and Duplicate, but this duplicates the whole stack.
Update in 10.3.0 (but maybe earlier), copy and paste seems to work, even across projects! - I found no hotkey for Run or Download.
- Cursor keys (panning) do nothing.
Python is a better. But not due to LEGO, but because they took a standard control for the editor. It behaves much like Microsoft Studio Code
- ^C, ^V, ^X for copy, paste, cut.
- ^Z, ^Y for undo, redo.
- Cursor movement with arrow or page keys, optionally in combination with ^.
- Select by pressing # while moving cursor.
- ^F, ^H for find and replace (grr: the hub bar overlaps with the find bar, bigger grr: paste does not work in the search bar).
- ^#P issues a play.
- ^#D issues a download.
- There is no way to clear the console other than to restart the whole mindstorms app - grr.
- You can only walk up (arrow-up, page-up, home) in the console, not down (arrow-down, page-down and end all jump to end), and the scroll bar sucks - grr.
- Fancy line commenting: ^K ^C add line comment, ^K ^U delete line comment, ^/ toggle line comment.
- #@A to toggle block comment.
- Very fancy multi cursor (bit over the top) with @click, or ^#@ with cursor movement.
- There is no rich languages editing, ^SPC appears to work but it doesn't know the object, it just shows all occuring strings.
LEGO started with the Mindstorms line in 1998 with the RCX (updated to v1.5 in 1999 and V2.0 in 2001). The next generation, known as NXT appeared in 2006 (and V2.0 in 2009). The third generation, EV3 appeared in 2013. I personally see Robot inventor as generation 4, but LEGO confusingly identifies the kit as 51515. It came out in 2020. So roughly every 7 years a new generation.
One of the problems is that these LEGO kits come with software, which is much earlier outdated than the hardware. As of now (jan 2023), the Robot Inventor software is fully supported, EV3 still installs (on windows), NXT requires some tweaks, and RCX PC software is hard to get running. In general, on the long run you are better of with community supported software (e.g. BricxCC or pybricks).
As mentioned, the hardware is less troublesome, but certaunly not without worries. Especially the RCX generation cables start to crumble.
On 26 Oct 2022, the LEGO group had bad news. LEGO decided to stop Mindstorms retail: "Robot Inventor ... to exit our portfolio from the end of 2022, whilst digital platforms – such as the LEGO Mindstorms Robot Inventor App – will remain live until at least the end of 2024." LEGO "will continue to support it [Build and Code - Maarten] through platforms such as SPIKE Prime".
A bit hidden feature in the Word Block editor are the two icons on the right hand side.
The bottom one (Show/Hide Monitor) allows you to show (hide) a pane with a live view of the variables.
Great feature! Not present in Python, but Python has a better feature: the console! A downside is that the monitor updates periodically (timed), so you do not see all changes.
The monitor feature does work in "download mode", you do not have to use "streaming mode". I did not expect that...

There are actually three ways to do that.
-
The most straightforward way is to press the Play button. Your program is compiled, uploaded and run. If a program was running on the hub, it is stopped. Note that the Hub has 20 slots (0..19), the app calls them "storage positions". By default your program goes to slot 0, but if you click one of the two "slot select buttons" (the arrows), you can specify another slot.
If you open the Hub connection on the PC, and then select tab Programs, you see the slots with the names of the project they currently store. Plus the option to delete or reorder slots.
-
Another way it to only download, not run: press the Download button in the slot selection pane.
-
A special way to run is streaming mode. It does not save the project in a slot. So code is lost on the hub after stopping the program. Python does not support streaming.

I'm not entirely sure of all the details of streaming mode.
- The program you’re creating is not stored in a slot on the hub as it is with download mode.
- Instead, the PC maintains a connection with the hub, and the instructions will stream to the hub as they are executed.
- Remote control (pane in Mindstorms app, or Game controller) requires streaming mode.
- You can make "live" changes in your program (see figure).

- You can single click any block (even in the left-hand side toolbar) to execute it immediately. It highlights yellow.

- You can even click a variable in the toolbar to see its value. It highlights yellow and shows speech bubble with current value.




However,
- Somehow, showing the monitor does not require streaming mode.
- Also, sound via PC does not require streaming mode.
- The "weather" extension does not need streaming either (but the project must be open in the LEGO app).
In streaming mode, the code is streamed from the PC to the hub, while the program is executed. This sounds a bit like an interpreter, and thus it sounds slow.
It isn't always. In fact, it is sometimes the other way around: streaming is nearly 1000x faster in the below program. Disclaimer: my test program does not execute a balanced set of blocks, and that is an understatement.
I guess the reason for this is that in streaming mode, all the code is run on the PC, and only actuator commands and sensor reads are streamed to the hub. So if you do not do "integer increments on the PC" but need "sensor or actuator actions on the hub" it is likely slower.

Yes, sort off. If you press Settings in the home screen, or Help > Setting, you can pick Help and Support and then Word Blocks description. This has a two or three lines of help per block.
It has a very bad document structure (hard to see sections), does not support copy and paste, and worst of all, can not be opened while programming. Grr.

Good question: if your program doesn't stop, the hub will not power down, so stopping is important.
In Word Blocks, there is an explicit stop block.

In Python, I haven't found a good one yet.
The screen is a bit small, but we can make a 2x5 font for digits that is sort-of readable (especially the 0 and 8 are a bit hard to read).

I was inspired by Anton's mindstorms hacks but made it a bit simpler. See the Word Blocks Example.
The python version is even simpler, see question below.
The motors in Mindstorms 4 are a bit different from the earlier ones (NXT and EV3). The motors in the last 3 generations of Mindstorms all have a position sensor, but the one in Mindstorms 4 is absolute. So, for example, it not only knows that it moved 45 degrees, it also knows it is at 60 degrees (assuming the motor started at 15). The "0 degrees" is arbitrary, but it is marked on the motorhub.

So, a motor moves degrees (or rotations), the "delta", thereby moving from one absolution position to another absolute position. A position is always a number from (including) 0 to (excluding) 360 (in Python it seems to be -180..+180). The degrees to move can be any number, even fractional (not very exciting) or negative (turn the other way around).
The absolute sensor is nice for "non drive motors". When motors are used for driving, they turn and turn, and there is no need for a "zero" position. But when motors are used for a door, a windshield wiper, a swinging radar, a clock, the robot needs to know where the "zero" position is. In the past you needed a touch sensor for that (or drive the motor to a mechanical stop). But no longer in Mindstorms 4.
There is one small problem though: when a motor rotates, the position sensor wraps around: it goes from 357, 358, 359, 0, 1, 2. To solve this, there is a second "sensor" relative position. This one keeps on counting. In the screenshot below, the motor moved (by hand actually) nearly 1.3 rotation. The relative position recorded this as 460 degrees, but the position of the hub is 100 degrees.

For me the term relative position is a bit confusing, I expected something like "cumulative degrees". But it is clear the position is actually "absolute position" (LEGO just dropped the "absolute"), so the other one is "relative" :-)
The position sensor is located in the "Motors" section of the Word blocks palette, but for the relative position sensor you need to enable the extension "More Motors".
One last word, some of my motors were ~10 degrees off with respect to their "zero mark". It is structural, so that was easy to fix by adding a correction of 10. However in later releases of the LEGO app, the motors were calibrated solving this problem.
There are several places where colors play a role.
The most obvious is the color sensor. It returns the detected color. Secondly, the center button can emit a chosen color. Also the 3x3 LED matrix from Spike Essential uses color.
The Word Block has a color picker, but sometimes, you might want to store or manipulate the numerical color value.

The "turquoise" color is the color of Robot Inventor (e.g. the hub bottom).
Also see the question "Are there hidden language features?".
At first, the amount of motor block is overwhelming. Let's look at the blue blocks first: "Motors".
The logo and name is a first important hint: the blue blocks ("Motors" and "More Motors") operate on a single motor. The pink blocks ("Movement" and "More Movement") operate on two motors, the left and right one for driving (movement).
Actually, that is a lie (but a simplification that helps understanding). The pink Movement blocks control two motors and keeps them in sync. If one stops (break it with your hand), the other stops as well. Think of a bulldozer with a left and a right track, they need to move at the same speed for the bulldozer to go straight. The blue motor blocks on the other hand, control one motor. So there is no syncing. And yes, you can use a blue block to control two motors in one go, but they are not synced.
Back to the blue blocks.

The first block tells the selected motor to move, either in rotations, degrees, or seconds. You can specify the amount and the direction (clockwise or counter clockwise). Note that if the amount is negative, the motor reverse the direction.
The only thing that is missing in this command is speed. LEGO decided to exclude speed from the motor blocks. Instead they have a separate set-speed block (5th in the figure above); it sets the default speed for that motor. We will see that some blocks do have a speed parameter, this takes precedence over the default speed. If there is no set-speed block, the defaults is 75%.
The second motor block is similar, but instead of setting an amount, we set a target position. Note that we can force the direction (clockwise or counter clockwise), or let the motor take the shortest path.
The first two blocks have a target (in rotations, degrees, seconds, or position). These blocks switch on the motor(s), waits till the target is reached, and switch off the motor. Only then the block finishes and the next block will be executed.
Block 3 and 4 split this start-wait-stop; they are needed when the target is not know when starting the motor. There is no amount, just direction (also here the speed comes from the set-speed block). Block 3 start-motor starts a motor, there is no wait the next block is executed immediately - but the motor keeps on rotating. At some moment - e.g. a sensor sees that the robot gets close to a wall - block 4 stop-motor is executed. By the way, note the subtle spacing in the figure above: block 3 and 4 belong together, the spacing is narrow.
Block 5 sets the default speed as discussed above.
Block 6 and 7 have a different shape. The first 5 blocks are known as Stack Blocks in scratch, I would call them statements. Block 6 and 7 are known as Reporter Blocks, I would call them (integer or string) expressions. In this case they are special form of an expression: they are a function call to a sensor. The position gives the (absolute) position of the motor (0..359), and speed the actual speed. Note that speed is not the speed set with the set-speed block, but the actual speed of the (running) motor.
There are more blue block: there is an extension with the obvious name More Motors. Roughly they add a speed parameter to the stack blocks.

The first "more motors block" is similar to the first "motors block". It tells the selected motor(s) to move, either in rotations, degrees, or seconds. You can specify the amount but not explicitly the direction (you can do that by negating the amount). What is extra is that we can override the default speed. Note that if the speed is negative, it also reverse the direction.
The second "more motors block" is similar to the third "motors block". It switches the motor on. No direction, but there is speed. Also here, if the speed is negative, direction is reversed.
The third one is similar to the second "motors block": it goes to a position. But in this case a relative position so there is no need for a path (clockwise or counter clockwise).
Note that relative position is like a software variable. It tracks changes in position, but it does not reset when position transitions from 359 to 0. With block 4 set-relative-position we can write that variable (usually reset it to 0), and with block 5 we can read it (find how much degrees the motor rotated since reset).
The next two blocks (6 and 7) are about power. I guess they measure current through the motors as opposed to RPM. Have not used this, but did test this in Python (see other question).
The stop and stall blocks (8, 9 , 10) are not working for me - do not understand them.
Have not used the acceleration.
Note that set-motor-stop, set-stall-detection, and set-acceleration, are settings, like set-speed.
Why are there pink Movement blocks next to the blue Motor blocks?
The pink Movement blocks control two motors and keeps them in sync. If one stops (break it with your hand), the other stops as well. Think of a bulldozer with a left and a right track, they need to move at the same speed for the bulldozer to go straight. The blue motor blocks on the other hand, control one motor. So there is no syncing.
The crux is the motors are kept in sync. You will mostly use them for driving, but you could also control two windshield wipers. Because they are often used for driving, we see one more unit for amount: centimeters (ok two: also inches). For this to work, we need to set the circumference of the wheel.

As we see, the standard wheel has a circumference of 175.9 mm, and indeed that is the default setting as we can see in the 7th pink block. The 6th block is probably even more important: it identifies which two ports are used for the movement motors. Please note that A+B is different then B+A: the direction reverses. The 5th block is the default speed setting for the movement motors. This completes the explanation of the last three block (5, 6, and 7), the settings blocks.

The blocks that are left (1-4) are familiar. We have two target blocks (1 and 2), where we can set the target (in cm, inch, rotations, degrees, seconds). We have the no-target blocks (block 3 and 4) that start and stop. All block have in common that we need to set the "synchronisation" between the motors.
The first block allows forward and backward (both motors same speed), or left and right (one motor still, the other rotating).
The second and third block allow to fine-tune the speed ratio between the wheels. This is a bit funny: up to 95% both motors go in the same direction, but one slower and slower (at 95% it is nearly stopped). However, at 100% the "slow" motor suddenly runs at full speed in reverse. See question below on movement graph (Python).
We can also add an extension, properly named More Movement.

As with the blue blocks, now the speed is part of the blocks, overriding the default. The difference with blue is that we need to set the speed for both motors. So either there are two speed parameters, or one "steer" and one "speed". Also here we have blocks that use power (motor current?) instead of speed (motor RPM).
And I have the not yet understood stop, stall or acceleration blocks.
The Word Blocks has a full palet of blocks to chose from. But you can add even more blocks, from so-called extensions. Example are
- Extra motor and movement block
- Sound via host
- Blocks that are specific for the models that come with the box
- Game controller integration

A bit hidden feature in the Word Block editor are the two icons on the right hand side.
The top one (Remote Control) allows you to create a "Remote Control" pane in the environment, with widgets. The widgets on the PC pane communicate via Bluetooth (and presumably also USB) to the Hub. On the hub they trigger events that can be used in your program.
There is one serious drawback: the program needs to execute in streaming mode (i.e. live connection to the PC).
The remote control is not present in Python - probably because it has no streaming mode.

Great feature! Missing are widgets that output content; most input events in you program. For example a virtual LED would be nice, or a string box, or a string list (dare I say "console").
Update there is now a widget to show output.

At this moment in beta, there is the option to add support for game controllers (Sony, Microsoft).
Click the Block Extension button and then either enable the Playstation DualShock or XBox One controller. New blocks will pop-up in your palette (left).
There is one serious drawback: the program needs to execute in streaming mode (ie live connection to the PC). Another drawback is the latency, lingo for "slow": the button press goes from controller, via Bluetooth link, to the PC; the PC streams actions to the hub.
The game control is not present in Python - probably because it has no streaming mode. It is pity that Python does not have a Bluetooth package so that we can directly hookup Bluetooth devices.

I ordered a replica DualShock4 of which the rumors tell it is working. In the mean time, I can confirm it works with LEGO Mindstorms.
It took me some time to get it connected to the (Windows) PC. This is what I did.
- Your PC must have Bluetooth. Laptops typically have that, desktops typically must use a Bluetooth dongle (e.g. something like this - note did not test this one myself!)
- You must have enabled Bluetooth in Windows.
Open the "action center" (notifications list; the speech bubble right to the clock in the system tray) and make sure Bluetooth is "blue".

- Only the first time, right-click on the blue Bluetooth button and select "Goto Settings".
- In "Bluetooth & other devices" settings, press "Add Bluetooth or other device".

- In the window that pops up, click "Bluetooth" (top) - I did not use "Everything else" (bottom) although it is mentioning Xbox controllers.

- Now, bring the game controller in pairing mode.
To do that, press the SHARE button, and while that is kept pressed, also press center POWER button.

Keep them both pressed for around 5 seconds, until pairing mode is entered. When pairing mode is entered, the colored light on the game controller starts flashing blue (two flashes then a wait). Release the two buttons when the flashing starts. - The game controller should appear in the "Add a device" list.
Click it. "Connecting" appears, and after a while you can click "Done".

Once connected, the colored light on the game controller is permanently on (blue). - The LEGO app should now also show that a controller is connected.







I wrote a test, which test all buttons, except SHARE, OPTIONS, or POWER.

Good question. Don't know myself.
I think that on Playstation 4 devices, you can click OPTIONS, then you get a menu and chose "power off" of the Playstation 4. Or you press the power button on the Playstation 4 - this likely also switches off it "keyboard" - the game controller.
But we don't have a Playstation 4 to switch off. What I do is to power cycle (switch off and on) Bluetooth in "action center".

Yes, I have the angular motor, and it is automatically recognized as a motor. The LEGO app does not make a difference with the standard motors.

The LEGO Robot Inventor does not ship with a "touch" sensor. Spike prime does, and you can order it separately. I did.
After adding the standard extension "More Sensors" we get Word Blocks for the force sensor.


Recall: when you use the Robot Inventor in the "test mode" (pressing the middle button when the screen shows the "play" slot) we can press the left or right button to change the speed of a connected motor.
When we hook up the color matrix in this test mode, it sort of works the same as for a motor: when we change the "speed" with the left and right button, the matrix changes color (all 9 LEDs in one go). This is a simple test to see different colors.
Recall: when you use the Robot Inventor in the "test mode" and hook a sensor on the port opposite to the port of the LED matrix (eg a force sensor on port A and the LED matrix on port B), the sensor controls the power level of the LED matrix. In this the case LED matrix does not show different colors but a sort of battery gauge.
For the nerds that understand the inner API of the LED matrix, in the first test setup, the hub drives LED matrix in mode 1 (color output), in the second test setup, the hub drives the LED matrix in mode 0 (level output). The most fancy mode (mode 2, different color/brightness per LED pixel) is not supported by the standard test firmware ("play" slot).
Even cooler: if - in test mode - we pair a color sensor with the 3x3 LED matrix, the hub drives the matrix in mode 1: the color sensed by the color sensor is send to the LED matrix - a color copier.
I did not yet succeed in controlling the LED matrix from plain Word Blocks. I do have a Python solution (see other question and answer below). And there is a Word Blocks solution if you are willing to use the debug blocks you get in the debug mode (see other question).
Are there hidden language features?
In some cases the Word Blocks have a parameter that is human friendly. As an example, in the Light section we find a Word Block to set the 4 LEDs around the ultrasonic distance sensor.

It is not obvious, but it is possible to use an expression for the argument.
For example, here I have a variable value that is a list of four integers, setting the brightness of the 4 LEDs.

As a fan of strong typing, I now wonder what the type of variable value is.
I guess, it is string, sinve Word Blocks does not put quotes around strings (see eg Light > Write).
What we learn here is that some arguments that look like needing an integer, are actually capable of parsing a string.
Robots can make sound, but some sounds come from the laptop (what LEGO confusingly calls the device, i.e. laptop, PC, tablet, phone) and others come from the hub itself.
If we add a "play sound" block, we can "Add sound". This gives us a dialog with several options

-
Sounds on hub ("Sounds library for on-hub")
This gives a list of 86 files. If such a file is used, the sound will be produced by the hub. As we see in the question "Where are the on-hub sound files?", all these files are already stored on the hub (part of the standard firmware) and are part of the IDE on the laptop.
Using such file does not take up any space, not when storing your lms file on your laptop's harddisk (it is already part of the IDE), nor when uploading your project to the hub (it is already part of the firmware).
-
Library ("Sounds library for on-laptop")
This gives a list of 193 files. These files are part of the LEGO IDE. If such a file is used, the sound will be produced by the laptop.
Using such file does not take up any space, not when storing your lms file on your laptop's harddisk (it is already part of the IDE), nor when uploading your project to the hub (it is not used/stored there).
-
Record ("Record sound for on-laptop")
This pops up a simple dialog with which you can record a sound sample (with the built-in microphone). The recorded file becomes part of your project. If such a file is used, the sound will be produced by the laptop.
Using such file does take up space when storing your lms file on your laptop's harddisk. It does not take up any space on the hub (it is not used/stored there).
-
Editor ("Edit sounds on-laptop")
This lists all the sound files on-laptop previously added with "Library" or "Record". Here they can be deleted (from the project - except the first "Cat Meow 1"), amplified, cropped, reversed, etc.
Using edited file does take up space when storing your lms file on your laptop's harddisk. It does not take up any space on the hub (it is not used/stored there).
We tested all flavours. Note that when selecting the sound, a purple buble folds open. It shows a tiny hub icon right of the name, indicating that a sound is produced from the hub. We have also explicitly labeled that via the comments.

We found one surprise: when we select an on-hub sound via a variable
(see Soundname set to Bing) it plays form the laptop and not from the hub.
The generated code is really different; the below fragment is from the debug console
(see question "Is Word Block compiled to Python?").
We see that the variable uses extensions["sound"].play() instead of sound.play_async().
# Play sound until done
await vm.extensions["sound"].play("Cat Meow 1", vm.store.sound_volume(), vm.store.sound_pitch(), vm.store.sound_pan(), wait=True)
# Control wait
yield 1000
# Play sound until done
await vm.extensions["sound"].play("MyRecordedSound", vm.store.sound_volume(), vm.store.sound_pitch(), vm.store.sound_pan(), wait=True)
# Control wait
yield 1000
# Play sound until done
await vm.system.sound.play_async("/extra_files/Bing", freq=pitch_to_freq(vm.store.sound_pitch(), 12000, 16000, 20000))
# Control wait
yield 1000
# Data setvariableto
vm.vars["SoundName"] = (STRING, "Bing")
# Play sound until done
await vm.extensions["sound"].play(get_variable(vm, STRING, "SoundName"), vm.store.sound_volume(), vm.store.sound_pitch(), vm.store.sound_pan(), wait=True)
# Control wait
yield 1000
# Play sound until done
await vm.system.sound.play_async("/extra_files/Zap", freq=pitch_to_freq(vm.store.sound_pitch(), 12000, 16000, 20000))I have no idea how to force a WordBlock translation to use sound.play_async().
We did overwrite the Zap file in the file system (see question "Can I make my own sound from the hub in Python?"),
and that plays our own sound.
It is quite complicated to understand which sounds play in which "connection scenario".
-
When running the program by pressing play in slot from the IDE, all sounds play, as shown in the image above on hub or laptop.
-
When running the program by pressing play from the IDE in streaming mode, all sounds play as shown in the image above, except the one with the variable. That one actually hangs the program.
-
When running the program by pressing the center button on the hub, with the IDE connected (USB), and the program being open in the IDE, the IDE actually behaves as if the play in slot command was given in the IDE. So all sounds play as shown in the image.
-
When running the program by pressing the center button on the hub, with the IDE connected (USB), and another program being open in the IDE, the on-hub sounds are played on-hub, and the known on-laptop sounds are played on the laptop (meow), but the MyRecordedSound and the Bing-via-variable don't play. They cause a wait of 25 seconds, but no hang.
-
When running the program by pressing the center button on the hub, while the hub is running stand alone (no connection to laptop), the on-hub sounds are played on-hub (Bing and Zap/stop), and the on-laptop sounds are skipped (no wait, no hang).
Conclusion
- Variable trick is not portable.
- On-hub sounds are ok.
- Overwriting on-hub sounds works (but sound name no longer covers content - a hub aspects impacting all programs)
- On-laptop (library or created) are ok, but are skipped when running stand-alone.
We need a bit of python, to list all the files in the directory /extra_files.
import uos
dir = '/extra_files'
for sound in uos.listdir(dir) :
path = dir+'/'+sound
stat = uos.stat(path)
print( '{:-35} {}'.format(path,stat[6]) )This results in the 86 files listed under "Sounds on hub" in WordBlocks.
/extra_files/Affirmative 49108
/extra_files/Damage 30370
/extra_files/Exterminate 35456
/extra_files/Fire 22328
/extra_files/Grab 36366
/extra_files/Hammer 30336
/extra_files/Laser 21894
/extra_files/Laugh 51744
/extra_files/Mission Accomplished 54868
/extra_files/Punch 16052
/extra_files/Scanning 58052
/extra_files/Seek and Destroy 61052
/extra_files/Shut Down 40052
/extra_files/Target Acquired 56788
/extra_files/Target Destroyed 50018
/extra_files/Whirl 20052
/extra_files/1234 58336
/extra_files/Delivery 42784
/extra_files/Dizzy 44030
/extra_files/Goodbye 22154
/extra_files/Hello 23068
/extra_files/Hi 15206
/extra_files/Hi 5 28992
/extra_files/Humming 72348
/extra_files/Chuckle 32052
/extra_files/Like 22902
/extra_files/No 25172
/extra_files/Ouch 26576
/extra_files/Sad 43636
/extra_files/Scared 23892
/extra_files/Tadaa 36534
/extra_files/Wow 29824
/extra_files/Yes 24654
/extra_files/Yipee 30454
/extra_files/Yuck 24590
/extra_files/Activate 39670
/extra_files/Kick 28504
/extra_files/Shake 37182
/extra_files/Deactivate 44006
/extra_files/Initialize 43630
/extra_files/Brick Eating 48052
/extra_files/Horn 25340
/extra_files/Hydraulics Down 48052
/extra_files/Hydraulics Up 48052
/extra_files/Reverse 59990
/extra_files/Revving 55772
/extra_files/Shooting 27270
/extra_files/Play 19286
/extra_files/Countdown 160052
/extra_files/Countdown Tick 160052
/extra_files/Error 11470
/extra_files/Ping 32052
/extra_files/Success Chime 21888
/extra_files/Bowling 40052
/extra_files/Celebrate 43620
/extra_files/Explosion 42018
/extra_files/Goal 38940
/extra_files/Hit 28490
/extra_files/Slam Dunk 23260
/extra_files/Strike 25182
/extra_files/Bing 34056
/extra_files/Bumper 26056
/extra_files/Charging 88056
/extra_files/Dial Down 38056
/extra_files/Dial Up 34056
/extra_files/Failure Chime 23056
/extra_files/Flutter 48098
/extra_files/Glitch 16056
/extra_files/Growl 74540
/extra_files/Ha Ha Ha 58056
/extra_files/Ha Ha 31056
/extra_files/Ha 15056
/extra_files/Oh No 65056
/extra_files/Oh Oh 24056
/extra_files/Oh 22056
/extra_files/Power Down 44056
/extra_files/Power Up 44056
/extra_files/Slow Down 29056
/extra_files/Sonic Explosion 56056
/extra_files/Static 45056
/extra_files/Stomp 38056
/extra_files/Theremin 30734
/extra_files/Tweet 54056
/extra_files/Void 35056
/extra_files/Warp Speed 104056
/extra_files/Zap 50056
Python lacks the monitor feature. Bummer! But it does have something better: a console.
You can just print() in the hub code, and the print result is send to the PC console.

I have not yet found a way to input() - that is a pity.
I also have not found a way to clear the console.
Finally, I have not found keys to scroll down the console.
The help for Python is found on the right had side in the Python editor.
It is better than the help for Word Blocks. Document structure is better but not good. Does support copy and paste (although not for every piece of text). Can be open during programming (pfeew).

Good question: if your program doesn't stop, the hub will not power down, so stopping is important.
In Word Blocks, there is an explicit stop block.
In Python, I haven't found a good method yet. I did find sys.exit(0) (don't forget the import sys).
It does stop the program, but with a sort-of error.
You can see this in the console (red message), but also the center LED on the hub flashes red 3 times.

Instead of using sys.exit(), we can also use raise SystemExit, which is more or less the
same.
It also suffers from the same problem: red message in console and red flashes on hub.
There is no easy way in Python to put an image in the 5x5 matrix, other then the list of standard ones.
There is the hub.light_matrix.set_pixel(x,y,bright) API, setting one pixel at a time.
I made my own helper.
from mindstorms import MSHub
hub = MSHub()
# Lights up 5x5 matrix.
# Parameter `bits` is a 25 bits vector: a 1 switches on that LED.
# Bit 24 is upper left, bit 0 is lower right.
def set_image(bits):
hub.light_matrix.off()
cur=1<<24
for y in range(5):
for x in range(5):
if bits & cur : hub.light_matrix.set_pixel(x,y,100)
cur >>= 1
spiral= 0b_01111_10000_10110_10001_01110
set_image( spiral )with this as result

A downside of the helper is that it sets all pixels either to 0 or to 100 percent brightness.
As it turns out, there is a low-level way.
This means, not using minstorms.MSHub, but rather hub. Secondly, it is not obvious that hub.display.show() is overloaded:
it not only accepts strings (hub.display.show("Hello")), but also images.
I hear you ask what images are. Well, images are objects created from the class Image.
>>> import hub
>>> img=hub.Image('97531:86420:00900:02468:13579')
>>> hub.display.show(img)
Yes. This is already clear when we power-up or shut-down the hub: we hear a sound.
These sounds are thus stored on the hub, and are playable.
Some investigations reveal the sounds are stored as files in the directory sounds on the hub.
With the following Python program we can list them.
import uos
dir = '/sounds'
for sound in uos.listdir(dir) :
path = dir+'/'+sound
stat = uos.stat(path)
print( '{:-35} {}'.format(path,stat[6]) )This results in 6 files, with sizes 13k to 66k bytes.
/sounds/menu_click 13632
/sounds/menu_fastback 17584
/sounds/menu_program_start 15832
/sounds/menu_program_stop 34000
/sounds/menu_shutdown 65706
/sounds/startup 39682
We can play these (in Python, but not, as far as I know, in Word Blocks).
import hub
hub.sound.play('/sounds/startup')Anton from Anton's MINSTROMS hacks explains the file format for sound files on the hub: 16bit signed integers, but use only 12 bits positive numbers. I verified that, see notebook. So, when we convert an audio file to 16 bit signed, we do need to map the input values to 0 (from -32768), and 4096 (from +32767).

Steps
-
Get a sound file, e.g. via the standard Windows app Voice Recorder. I recorded stop.m4a.
-
Crop the part you want and maximize ("normalize") volume. I used the online twistedwave editor to obtain stop.wav.
-
Perform the remapping from Anton. Like him, I use sox (needs download, but does not need installation) to obtain stop.raw.
sox stop.wav --bits 16 --channels 1 --encoding signed-integer --endian little --rate 16000 stop.raw vol 0.0625 dcshift 0.0625Note that the output file name
stop.raw- the extensionrawis a simple way to tell sox not to add headers to the output file (just like LEGO hub wants). Also note the volume reduction factor (vol0.0625 for 65536 to 4096) and the shift(dcshift2048 on 32768). The resulting file is 22950 bytes, so well below the average of the six standard sound files.-
Anton suggests to append a
fadedirective to obtain stopfade.raw.sox stop.wav --bits 16 --channels 1 --encoding signed-integer --endian little --rate 16000 stopfade.raw vol 0.0625 dcshift 0.0625 fade h 0.05 -0.05 -
If I play
stop.rawon the hub (see next steps), I hear one "sound plop" (something not right in the samples?). If I playstopfade.raw, I hear three "sound plops". That suggests the original plop, plus maybe a plop at the start and the end. I analyzed my files (see end of notebook) and noticed that not only the fade gives artifacts but also that there are (rounding?) errors leading to samples with values over 4095. My suggestion therefore is to use a smaller volume reduction (0.0625 to 0.0624) and not using the fade.sox stop.wav --bits 16 --channels 1 --encoding signed-integer --endian little --rate 16000 stop2.raw vol 0.0624 dcshift 0.0625This results in our final stop2.raw
-
One other remark: each time I run sox with the same command, I do get a different output file. I have no idea why that happens.
-
-
Upload the
stop2.rawto the hub. I used μPIDE (download just exe, does not need installation, plug in hub via USB, make sure LEGO IDE does not use the hub COM port). Just drag the file to the/sounds/directory
-
Give it a try (in μPIDE REPL or close μPIDE and start the LEGO app) and play the raw file.
import hub hub.sound.play('/sounds/stop2.raw')

The screen is a bit small, but we can make a 2x5 font for digits that is sort-of readable (especially the 0 and 8 are a bit hard to read).
This version uses the high level MSHub module.
The function decdigits(num) shows a number between 0 and 99 on the screen.
font = [ "99999:99999", "90090:99999", "99909:90999", "90909:99999", "00990:99999", "90999:99909", "99999:99909", "99909:00099", "99099:99099", "90999:99999" ]
def decdigits(num) :
hub.light_matrix.show( font[num//10] + ":00000:" + font[num%10] )
hub = MSHub()
hub.speaker.beep()
for ix in range(100) :
decdigits(ix)
wait_for_seconds(0.2)This version uses the low level hub module.
The function hexdigits(num) shows a hexadecimal number between 0 and ff on the screen.
import hub,time
font = [ "99999:99999", "90090:99999", "99909:90999", "90909:99999", "00990:99999", "90999:99909", "99999:99909", "99909:00099", "99099:99099", "90999:99999"
, "99909:99999", "99999:99900", "99999:90009", "99900:99999", "99999:90909", "99999:00909" ]
def hexdigits(num) :
img = hub.Image( font[num//16] + ":00000:" + font[num%16] )
hub.display.show(img)
hub.display.align(5)
hexdigits(0xAf)
I did not yet succeed in controlling it from Word Blocks, but I do have a Python solution:
import hub, time
matrix = hub.port.A.device
matrix.mode(2)
while True:
matrix.mode(2,b"III@@@@@@")
time.sleep(4)
matrix.mode(2,b"@@@@@@FFF")
time.sleep(2)
matrix.mode(2,b"@@@HHH@@@")
time.sleep(1)Notes
-
We use the
deviceof aport. -
We must first select
mode(2). -
Next we must send exactly 9 bytes to configure the LED matrix - note that we use a byte string
b'...'. -
The byte at position
iin the string controls LEDi. -
The value
vof each byte shall bev=b*16+c, wherebis the brightness, andcthe color. -
Legal values for
bare 1..10, and legal values forcare 0..10. -
b=1 is most dim, b=10 is most bright.
-
c is the standard LEGO color scheme.
0 1 2 3 4 5 6 7 8 9 10 off magenta violet blue turquoise mint green yellow orange red white -
If we write
vin hex it looks likebc: e.g. most dim blue is \x13 and the most bright red is \xA9. -
Note that the brightness level 3 colors are in the range
\x30, ..\x39,\x3A,
which happens to match the characters'0', ..'9',':' -
Similarly, brightness level 4 colors are in the range
\x40,\x41, ..\x4A, which happens to match the characters'@','A', ..'J', (brightness 5 would be'P', ..Z). -
Next, brightness level 6 colors are in the range
\x50,\x51, ..\x5A, which happens to match the characters'`','a', ..'j', (brightness 7 would be'p', ..z).
This leads to the following "shortcut" table.

I learned that each device has a "mode". A mode is sort of a register that determines the state of the device. The LED matrix has four modes, see readthedocs or pdf about the Raspberry pi Hat.
-
mode 0 = M0 = "LEV O" = level output
Mode 0 has an argument 0..9 that enables green bands showing a sort of battery level form 0=empty to 9=full -
mode 1 = M1 = "COL O" = color output
Mode 1 has an argument from 0 to 10, and all LEDs will light up brightly in that color (see table above). -
mode 2 = M2 = "PIX O" = pixel output
Mode 2 has nine arguments: b*16+c, where b is brightness (0..9) and c is color (0..10) for each of the nine pixels -
mode 3 = M3 = "TRANS" = transitions
Mode 3 has one argument the transition effect: 0 is none (default), 1 is row-by-row, and 2 fade-down-fade-up.
The below script tests all modes.
# Testing the LEGO Spike Prime Essentials 3x3 LED matrix
# see eg https://buildhat.readthedocs.io/en/latest/buildhat/matrix.html
# see eg https://datasheets.raspberrypi.com/build-hat/build-hat-serial-protocol.pdf
import hub,time
matrix = hub.port.F.device
# mode 0 = M0 = "LEV O" = level output
# select 0 ; write1 c0 p -- where p is a number from 0 to 9, will light the matrix in bar-graph style according to the value of p.
# Maarten: rows of green in increasing brightness: 0=000, 1=001, 2=002, 3=003, 4=013, 5=023, 6=033, 7=133, 8=233, 9=333 useful as battery level
matrix.mode(0)
matrix.mode(0,b"\x07") # do not yet understand coding
time.sleep(1)
# mode 1 = M1 = "COL O" = color output
# select 1 ; write1 c1 p -- where p is a hexadecimal number from 0 to 0x0a will light the matrix in a solid colour according to the value of p.
# Maarten: all nine leds bright in color p
matrix.mode(1)
matrix.mode(1,b"\x08") # 8 is orange
time.sleep(1)
# mode 2 = M2 = "PIX O" = pixel output
# write1 c2 67 72 78 82 89 92 9a a4 aa -- The first hex digit (from 0 to a) specifies the brightness and the second hex digit (from 0 to a) the basic colour.
# Maarten: nine leds set, each to \xbc: brightness b and color c
matrix.mode(2)
matrix.mode(2,b"\x67\x72\x78\x82\x89\x92\x9a\xa4\xaa")
time.sleep(1)
matrix.mode(2,"cccfffggg") # normal strings (not explicitly byte strings) work
time.sleep(1)
matrix.mode(2,"ddd") # Too short does not work
time.sleep(1)
matrix.mode(2,"iiiiiiiijjjjjjjjjjjjjjjjjjjjjjjjjjj") # Too long works
time.sleep(1)
# mode 3 = M3 = "TRANS" = transitions
# write1 c3 1 -- enables row-by-row animated transitions
matrix.mode(3) # late insight: this line is not needed for mode 3 (it is not a mode but a parameter)
matrix.mode(3,b"\x01")
matrix.mode(2)
matrix.mode(2,b"\x67\x72\x78\x82\x89\x92\x9a\xa4\xaa")
time.sleep(5)
matrix.mode(2,b"\x99\x99\x99\x9A\x9A\x9A\x93\x93\x93")
time.sleep(5)
matrix.mode(2,b"\x91\x97\x93\x94\x95\x99\x9A\x92\x96")
time.sleep(5)
# write1 c3 2 -- enables a fade to black and fade back up.
matrix.mode(3) # late insight: this line is not needed
matrix.mode(3,b"\x02")
matrix.mode(2)
matrix.mode(2,b"\x67\x72\x78\x82\x89\x92\x9a\xa4\xaa")
time.sleep(5)
matrix.mode(2,b"\x99\x99\x99\x9A\x9A\x9A\x93\x93\x93")
time.sleep(5)
matrix.mode(2,b"\x91\x97\x93\x94\x95\x99\x9A\x92\x96")
time.sleep(5)
# Mode 0: No transition, immediate pixel drawing
matrix.mode(3) # late insight: this line is not needed
matrix.mode(3,b"\x00")There is a video on the result.
See also the question on "port info".
The behavior of the steer command in the (pink) motor pair blocks is not very intuitive.
When going straight, both motors have the same power. When going more and more to the right,
the left motor keeps its speed and right goes slower.
So far so good. But at 100, suddenly the right motor reverses.
Can we graph this?
Unfortunately, there is no console in Word Blocks, so I wrote a script in Python.
My assumption is that MotorPair.move() in Python maps to the pink blocks in Word Blocks.
The script loops over all steering values, lets the motors run for 1 second, and then checks how far they got (in degrees). Here is the code.
from mindstorms import Motor, MotorPair
motorA = Motor('A')
motorB = Motor('B')
motorAB = MotorPair('A', 'B')
measurements = []
for steering in range(-110,111):
motorA.set_degrees_counted(0)
motorB.set_degrees_counted(0)
motorAB.move(1, unit='seconds', steering=steering, speed=100)
measurement= ( steering, -motorA.get_degrees_counted(), motorB.get_degrees_counted() )
print(measurement)
measurements.append( measurement )If you run this is in REPL, you can copy the output - I don't know how to copy console output in the LEGO app :-(. The first few lines look like this (steering, left motor degrees, right motor degrees):
(-110, -819, 813)
(-109, -807, 809)
(-108, -808, 807)
(-107, -805, 808)
(-106, -807, 810)
(-105, -811, 812)
(-104, -809, 810)
(-103, -808, 812)
(-102, -808, 812)
(-101, -815, 814)
(-100, -806, 809)
(-99, -4, 417)
(-98, 0, 416)
(-97, 13, 438)
(-96, 26, 453)
(-95, 28, 586)
(-94, 33, 609)
(-93, 45, 670)
(-92, 57, 718)
(-91, 66, 747)
(-90, 75, 764)
(-89, 88, 806)
(-88, 99, 816)
(-87, 107, 819)
(-86, 116, 821)
(-85, 124, 816)
I have saved the complete output as excel, and plotted this in a graph.

Looking at this graph I have the following obeservations
- It is symmetrical (positive versus negative steering) - that's good.
- Let's only look at positive steering 0..100 (steer to the right).
- The left wheel has constant speed (800) over nearly the full range (0 to ~90) - make sense.
- From ~90 to 99 there is a funny dip in the left motor speed - why?
- The right wheel has a linearly decreasing speed (800 to 0) over nearly the full range (0 to 99) - sounds good.
- The only exception is steering at 100, where the motor speed suddenly is -800 - rotate on the spot exception.
- The range above 100 is equal to the case at 100 - clipping, makes sense.
Simple example of a callback with a button in REPL:
import hub
hub.button.center.on_change(lambda ms:print("pressed",ms))This "installs" a callback. You get the REPL prompt back, and nothing seems to have changed. But when you now press the center button for about 1 sec, out of the blue there is this message.
pressed 0
pressed 1030
With hub.button.center.on_change(None) you remove the callback.
Note that the callback is like an interrupt service routine!
import hub
import time
count = 0
def reset_count(ms):
global count
count = 0
hub.button.center.on_change(reset_count)
def do_count():
global count
while True:
print(count)
count = count + 1
time.sleep(1)This is a demo run.
>>> do_count()
0
1
2
3
4
5 # Pressed the center button of hub here
0
1
2
3
4
5
6
7 # Pressed ^C in REPL here
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
File "<stdin>", line 17, in do_count
KeyboardInterrupt:
>>>The Python API has a motor.get(). It returns 4 numbers what are those?
The first number is the speed, and the last (forth) number is power.
You can check that by executing hub_runtime.hub.port.B.motor.run_at_speed(30), and the do a get().
The first number returned is 30.
If you slow the motor with your hand, you see the first number stay at 30, but the last number goes up: you need more power to keep speed.
>>> hub_runtime.hub.port.B.motor.run_at_speed(30)
>>> hub_runtime.hub.port.B.motor.get()
[30, 7673, 133, 32]
>>> hub_runtime.hub.port.B.motor.get()
[30, 12439, -141, 42]
>>> hub_runtime.hub.port.B.motor.run_at_speed(0)If on the other hand, you issue hub_runtime.hub.port.B.motor.pwm(40) and then do get()s,
this changes (note that PWM is a frm of power control).
The first number returned is ~40.
If you slow the motor with your hand, you see the first number drop, but the last number stays at 40: with constant power, the speed reduces with friction.
>>> hub_runtime.hub.port.B.motor.pwm(40)
>>> hub_runtime.hub.port.B.motor.get()
[41, 22643, -16, 40]
>>> hub_runtime.hub.port.B.motor.get()
[30, 24829, 10, 40]
>>> hub_runtime.hub.port.B.motor.pwm(0)The middle two numbers are the relative and absolute position.
In the image below, I first aligned the motor on the O (actually just over it) - and then I powered it (plugged it in). Notice that the absolute position is indeed a bit positive (18). The relative position is a software position, initialized to 0 on power up. So, first photo shows 0, 18
The I (manually) turned the motor clockwise by 61 degrees. Second photo confirms that the relative position is now 61 and the absolute 79.
I hand rotated about 80 more clockwise, with 139, 158 as result. Still makes sense.

A small surprise comes after rotating another 50 degrees clockwise. The relative position 139 increases to 193, which makes sense. The absolute position changes from 158 to -149. So here we see that absolute positions are in the range -180..+180.
Turning some more clockwise goes to 308, -33, so relative still grows and absolute gets closer to 0.
Turning even more clockwise, the relative keeps on counting even beyond 360 (377), and absolute starts increasing from 0 again.
When I handposition my 4 motors to O, then connect them to the hub, and then check their position, I get this result
>>> hub_runtime.hub.port.A.motor.get()
[0, 0, 15, 0]
>>> hub_runtime.hub.port.B.motor.get()
[0, 0, 5, 0]
>>> hub_runtime.hub.port.C.motor.get()
[0, 0, 0, 0]
>>> hub_runtime.hub.port.D.motor.get()
[0, 0, 3, 0]
I did the handpositioning 5 times (with a reset of the hub) and tabulated that.
| motor | test 1 | test 2 | test 3 | test 4 | test 5 | average |
|---|---|---|---|---|---|---|
| A | 15 | 12 | 12 | 17 | 12 | 13.6 |
| B | 5 | 6 | 4 | 4 | 6 | 5.0 |
| C | 0 | 5 | 5 | 5 | 4 | 3.8 |
| D | 3 | 6 | 4 | 7 | 9 | 5.8 |
My conclusion is that the sensor offset is structural (as in "LEGO mounted the sensor a couple of degrees rotated"). Especially the motor connected to port A has a large deviation.
We can also test it the other way around: tell the motors to go to position 0 and look at it.
>>> from mindstorms import Motor
>>> Motor('A').run_to_position(0)
>>> Motor('B').run_to_position(0)
>>> Motor('C').run_to_position(0)
>>> Motor('D').run_to_position(0)As we see in the photo, none of the motors is at position O.

NOTE In the mean time, the LEGO app has a feature to calibrate the zero position of the motors, fixing this issue.
The LEGO app wants us to use
>>> from mindstorms import MSHub
>>> h=MSHub()
>>> h.status_light.on()Note that we create an h object from the MSHub class in the mindstorms package.
On that object, we call the on() method on a status_light property (?).
The above does work in Python's REPL. But the REPL way suggests an alternative:
we can use the hub package, and call the led function.
>>> import hub
>>> hub.led(0,99,0)What is going on here - why are there two methods? As Erik Mejer explains, there are two layers.

The upper layer is the easy to get started with one. It's promoted and documented in the app; it’s what gets imported by default.
The lower layer gives access to more functionality but at the risk that it may not play well with the rest of the systems running on the hub.
There is the complete overhaul pybricks. It replaces the IDE (by a browser app), it replaces the firmware (no worries, you can always put the official LEGO one back), it supports Robot Inventor (Spike Prime) but also other LEGO bricks (like the technic hubs).
A very light Python IDE is https://github.com/harbaum/upide. Works out-of-the-box with Spike and Robot Inventor. I like it: simple, yet gives full acess to file system and REPL.
There seems to be a VS code extension. Have not tried it. https://github.com/PeterStaev/lego-spikeprime-mindstorms-vscode with some documentation.
Use uasyncio (?) or check out my multitask project.
You might also check out azzieg's github where he explains how WorkBlocks are translated to python, using a virtual machine - that you can also deploy yourself if you want advanced python features like parallel tasks.
The LEGO app saves Mindstorms projects as files with the extension .lms (LEGO MindStorms presumably).
This is a binary file format, which is a pity for Python programs.
However, an lms file turns out to be an archive. If you have, e.g. 7zip you can unzip lms files.

This icon.svg is the icon displayed on the projects page. For a Python program it is a fixed one, for a Word Blocks program it is a "picture" of the program.
The manifest.json contains unknown details. I have freely formatted it for readability (e.g. removed all details of the frames field for the Word Blocks, added whitespace).
{ {
"type":"word-blocks", "type":"python",
"autoDelete":false, "autoDelete":false,
"created":"2020-10-26T11:40:45.552Z", "created":"2020-10-27T09:01:52.735Z",
"id":"TWLdDSlhsQyc", "id":"oU3m7qCYhOst",
"lastsaved":"2020-10-27T19:07:51.938Z", "lastsaved":"2020-10-27T09:47:52.208Z",
"size":19529, "size":1148,
"name":"test 2", "name":"version 1",
"slotIndex":0, "slotIndex":0,
"workspaceX":119.99999999999989, "workspaceX":120,
"workspaceY":119.99999999999955, "workspaceY":120,
"zoomLevel":0.675, "zoomLevel":0.5,
"showAllBlocks":false, "hardware":{
"version":6, "python":{
"hardware":{ "name":"LEGO Hub A8:E2:CC:BB:EE:DD",
":V-eSnh?r]sx%eM7=Sn|":{ "connection":"bluetooth-classic",
"id":"COM4", "lastConnectedHubId":"a8:e2:cc:bb:ee:dd",
"description":"", "id":"a8:e2:cc:bb:ee:dd",
"connection":"usb", "type":"flipper"
"name":"LEGO Hub", }
"type":"flipper", },
"hubState":{"programRunning":false}, "state":{}
"lastConnectedHubId":"COM4" }
}
},
"extensions":["flipperevents","flippersensors"],
"state":{
"playMode":"play",
"canvasDrawerTab":"monitorTab",
"canvasDrawerOpen":true
},
"animations":{
"Q62qCPATcnucgz9Ldm_T":{
"params":{
"transition":2,
"frames":[{"pixels":[...]}...],
"loop":false,
"fps":8,
"animationName":"Play"
},
"lastSave":1603712445547,
"id":"Q62qCPATcnucgz9Ldm_T"
}
}
}
The third file is the actual program. For Word Blocks, some format, unknown to me. For Python, it is the Python text wrapped in json, below freely formatted by me for readability.
{"program":
"
import sys\n
\n
# print( dir(sys) )\n
# for n in dir(sys): print( \"sys.\"+n+\" = \", eval(\"sys.\"+n) )\n
\n
print( \"byteorder=\", sys.byteorder )\n
print( \"implementation=\", sys.implementation )\n
print( \"maxsize=\", sys.maxsize )\n
print( \"path=\", sys.path )\n
print( \"platform=\", sys.platform )\n
print( \"version=\", sys.version )\n
\n
"}At the side of the hub, we see a small icon next to each port. The icon looks like two triangles, likely indication input and output.
![]()
A closer look has a surprise for us: port E and F have an extra "slash" in the icon.
On lego education website, we find the datasheet of the hub and it gives a clue
Input/output ports:
• 6x LPF2 input/output ports (ports A, B, C, D, E , and F)
• 115 kB port speed (ports E and F are prepared for "high-speed")
However, I have not been able to verify this.
I tried, in Python, to use "low speed" (1200) and "high speed" (115200) on the uart behind the A port. I later noticed that LEGO used 115kB instead of 115kb. This could mean byte instead of bit. So I even tried a baud rate of 8 times 115200: 921600.
import hub
import time
def test(ssos,baud):
print(ssos,baud)
ssos.mode( hub.port.MODE_FULL_DUPLEX )
while not hasattr(ssos, 'baud') : pass # Wait till `ssos` is serial port
ssos.baud(baud)
ssos.write( b"123")
time.sleep_ms(50)
test(hub.port.A, 1200)
test(hub.port.A, 2400)
test(hub.port.A, 4800)
test(hub.port.A, 9600)
test(hub.port.A, 19200)
test(hub.port.A, 38400)
test(hub.port.A, 57600)
test(hub.port.A,115200)
test(hub.port.A,230400)
test(hub.port.A,460800)
test(hub.port.A,921600)The trace on Saleae shows that not only 115200 but even 921600 works on port A (the 123 is decoded by Saleae).

For related info see post of Gianluca Cannalire He also has a post telling that the firmware changed
Found a link but it works so-so.
First of all note that LEGO renamed dig0 and dig1 to p5 and p6.
The following code configures p5 as output, then pulls it high then low.
import hub
hub.port.A.mode(hub.port.MODE_GPIO)
p5=hub.port.A.p5
p5.direction(1)
p5.value(1)
p5.value(0)
p6=hub.port.A.p6
p6.direction(1)
p6.value(1)
p6.value(0)It works, but somehow a connected LED is very low-lit (I used current limiting resistor of only 180).
Found a link
but I do not succeed in importing I2C from umachine or machine.
Yes we can. The LEGO app can be switched to Debug mode, and this gives us several peeks. You must have some software background to do this.
The process to switch the LEGO app to Debug mode is described by attilafarago. In a nutshell, take these steps:
- Exit the LEGO app.
- Navigate in your file explorer to
C:\Users\<user>\AppData\Local\Packages\TheLEGOGroup.LEGOMINDSTORMSInventor_m36angppq0g76\LocalCache\Roaming\MINDSTORMS_ROBOTINVENTOR\. - Open
settings.json(suggest to back-up that file first). - Add the line
"ui.debug": true,(at the top) assuming it is not there yet, otherwise changefalsetotrue. - Restart LEGO app, it has a warning at the bottom
Debug Mode (Click to expand).
Read the post of attilafarago for details, but for me the most important aspects of the Debug mode are these:
- When we click the
Debug Mode (Click to expand)we get an extra side panel with debug options. Will not discuss that in this FAQ. - The menu bar at the top has an extra "Debug" entry. With this we can see how the Word Blocks are compiled to Python code just before they are send to the hub. See question below.
- We get an extra extension: Word Block for advanced usage. For an example see the question on the 3x3 LED matrix.
It seems that for OSX, the file is ~/Library/Containers/com.lego.retail.mindstorms.robotinventor/Data/Library/Application\ Support/MINDSTORMS_ROBOTINVENTOR/userSettings.json.
Yes it seems so.
- Enable Debug mode (see other question).
- Create a Word Block program.
- Press the new menu entry
Toggle Developer Tools, this pops up an extra window. - Select the
consoletab. - Compile/upload the program to the hub (as you normally would, e.g. press the play button).
- On the console you see the generated Python code.

import hub
from runtime import VirtualMachine
# When program starts
async def stack_1(vm, stack):
# Control forever
while True:
# Beep for time
await vm.system.sound.beep_async(60, 200)
# Control wait until
while True:
if hub.button.right.is_pressed():
break
yield 0
# Beep for time
await vm.system.sound.beep_async(72, 200)
# Control wait until
while True:
if hub.button.left.is_pressed():
break
yield 0
yield
def setup(rpc, system, stop):
vm = VirtualMachine(rpc, system, stop, "DoQxmpFih88L1GjKB3fI")
vm.register_on_start("EnSC-Bz3km2eRaiY5isv", stack_1)
return vmAfter a study in Python (see question below), I learned how to control the matrix.
Mode 0 uses the matrix as a "battery level indicator", will not use that here. Mode 1 switches the whole matrix to one uniform color at one high brightness level. Mode 2 allows individual LEDs in the matrix to be controlled qua color and brightness. That does sort-of work. Mode 3 configures transitions between matrix mode switches.
The LED matrix does (not yet) have a Word Block, but the Debug mode offers Word Blocks that we can use.
- Enable the Debug mode (see a question above).
- Start a new Word Blocks project
- Press the "Show block extensions" on the left bottom.
- At the bottom of the extensions press the "debug" button. This adds a dark blue group of debug extensions.
- Now enter below program.

As we can see in the YouTube video, mode 1 and 3 work, but 2 doesn't.
That is bad, because mode 2 is the most important mode of the matrix.
It turned out that the error is the string we send; we should not pass a string of nine bytes, we should pass a list of nine numbers separated by spaces. See below for details - and a bug in the Debug blocks.
For mode 2, we need to send 9 bytes to the matrix. In Python we can just send a string of 9 characters and that is what I tried in our first experiment: send a string of 9 characters, just like in Python.
Didn't work. I decided to send a list of 9 integers (lst filled with nine integers via col).

And the good news is: that works ... except for bright colors.
Later I found out that the list variable (lst) is not needed, we can simply enter a list of numbers in the Word Block,
we just need to separate the numbers with spaces.

Both the above Word Block programs work exactly the same. They make 4 times a pattern (the Dutch National Flag), and this is how they look (no video this time :-). Note that the last one is wrong - see below why.

Below each pattern (flag) we find the 9 (decimal) values that are in lst and are send to the
matrix. Below that, we see the same numbers in hexadecimal. This makes it easier to interpret
because the first nibble encodes the brightness, and the second nibble encodes the color
(an enumeration: red=0x9, white=0xA, blue=0x3, see another question).
Behind the scenes, the Word Block is translated to Python, and it converts the the series of 9 numbers to a byte array. That array is depicted on the third row.
However, there is a bug in the Word Block compiler; it uses UTF-8 to form the byte array, and that makes LED values above 127 (above 0x7F) to be encoded in two bytes. The byte that is prepended is the first UTF "escape" character 0xC2.
On the last line we see what that means for the brightest pattern, instead of 9 bytes we send 18 bytes to the matrix (which only looks at the first 9). Every odd byte is C2 which renders as purple, as we can see in the fourth flag above. The even LEDs are indeed three times red, then (one) white, and then we run out of LEDs.
I had a peek at the generated code, and I believe it really is a compiler bug.
The line below is from the generated code.
Here in action using LED values below 128.
We see that it produces a byte array of nine bytes,
with the bytes we expect (e.g. ASCII value of Y is 89, Z is 90 and S 83).
>>> bytes("".join([chr(math.floor(clamp(to_number(p_1), 0, 255) + 0.5)) for p_1 in " 89 89 89 90 90 90 83 83 83".split()]),"utf-8")
b'YYYZZZSSS'When using LED values above 128, we get a wrong result: a byte array of 18 bytes. The even bytes are all wrong (0xC2), the odd bytes are correct.
>>> bytes("".join([chr(math.floor(clamp(to_number(p_1), 0, 255) + 0.5)) for p_1 in "153 153 153 154 154 154 147 147 147".split()]), "utf-8")
b'\xc2\x99\xc2\x99\xc2\x99\xc2\x9a\xc2\x9a\xc2\x9a\xc2\x93\xc2\x93\xc2\x93'The fix is simple, the code should not go from int-array via char-array to byte-array. It should directly go from int-array to byte-array.
If we try this new code, with the values below 128 we get the same result as before.
>>> bytes([math.floor(clamp(to_number(p_1), 0, 255) + 0.5) for p_1 in " 89 89 89 90 90 90 83 83 83".split()])
b'YYYZZZSSS'When we try the new code with the high values it now also produces the correct result.
>>> bytes([math.floor(clamp(to_number(p_1), 0, 255) + 0.5) for p_1 in "153 153 153 154 154 154 147 147 147".split()])
b'\x99\x99\x99\x9a\x9a\x9a\x93\x93\x93'Would be nice if LEGO would fix this.
Would also be nice of the Debug Word Blocks would be a normal extension, and that you don't need to switch the app to Debug mode.
Finally, it would be nice if the to_number() would also accept numbers of the form 0x9A, that would make the LED settings easier to read (for the nerds).
Yes you can (instructable). The Python interpreter in the Hub has an interactive command shell that executes a so-called read-eval-print loop (REPL). The Hub has two serial links, one over Bluetooth and one over USB. Both are enabled for REPL.
Connect the Hub to your PC either via Bluetooth, or, easier, a USB cable. Right click on the Windows start button and select Device Manager, and fold open the Ports (COM & LPT) section. It requires some experimentation (e.g unplug USB to see which port disappears) to determine which port(s) connect to the Hub. In my case it is COM4 (serial over the USB link) and COM5 (serial over Bluetooth).

Next, we need a terminal program to send an receive commands over serial. I happen to use an oldy realterm, but putty is a good and popular alternative.
Configure the COM port (115200/8/N/1), and connect.
The hub is running a program (I think runtime.start()) that spits out data, and this now floods the terminal. Stop that program by sending a CTRL-C.
We get a prompt from MicroPython v1.11-1139-gf7407e5a0 on 2020-06-19; LEGO Technic Large Hub with STM32F413xx

A good start is the trusted dir() command.
>>> dir()
['hub_runtime', 'gc', '__name__', 'micropython']The gc object controls the garbage collector,
variable __name__ holds the value '__main__', and
object micropython helps in access and control of the internals.
Our best candidate is hub_runtime.
If you want to know what such an object offers, use dir again (dir(hub_runtime)).
Even better, this REPL offers command completion with the TAB key.
For example, after type huTAB, we get hub_runtime, if we then type .TAB we get
>>> hub_runtime.
__class__ __name__ start __file__
BT_VCP Timer USB_VCP hub
init LightMethods LinegraphMonitorMethods
MotorMethods MoveMethods SoundMethods WaitMethods
ProgramMethods HubMethods get_event_loop register_ports
TIMER_PACE_HIGH error_handler pop_force_reset
RTTimer notify_gesture_event RPCProtocol
system ProgramRunner HubUI runtime
scratch sensors __connection_changed
>>> hub_runtime.After some searching, we can get the current yaw via a call to the position.
We called twice, rotating the hub in between.
First number looks like the yaw.
>>> hub_runtime.hub.motion.position()
(25, -1, 0)
>>> hub_runtime.hub.motion.position()
(44, -1, 0)
>>>The help() command, as suggested when we pressed ^C, is not very useful.
>>> help()
Welcome to MicroPython!
For online help please visit http://micropython.org/help/.
Quick overview of commands for the board:
hub.info() -- print some general information
hub.status() -- print sensor data
Control commands:
CTRL-A -- on a blank line, enter raw REPL mode
CTRL-B -- on a blank line, enter normal REPL mode
CTRL-C -- interrupt a running program
CTRL-D -- on a blank line, do a soft reset of the board
CTRL-E -- on a blank line, enter paste mode
CTRL-F -- on a blank line, enter filetransfer mode
For further help on a specific object, type help(obj)
For a list of available modules, type help('modules')
>The hub.info() does not work: name 'hub' isn't defined (we already knew that, hub was not listed by dir).
The "Control commands" seem a bit advanced now - see here for some help.
There is one good hint though: help("modules").
>>> help("modules")
__main__ math uerrno urandom
_onewire micropython uhashlib ure
builtins sys uheapq uselect
cmath uarray uio ustruct
firmware ubinascii ujson utime
gc ucollections umachine utimeq
hub uctypes uos uzlib
Plus any modules on the filesystemThis lists the module hub! Let's try to import it, and give the status command.
>>> import hub
>>> hub.status()
{'gyroscope': (2, 8, 3), 'position': (51, 0, 0), 'accelerometer': (15, -8, 1026)
, 'port': {'C': [0, -2, 12, 0], 'D': [], 'B': [0, 2, 70, 0], 'E': [], 'A': [0, -
1, 168, 0], 'F': [14]}, 'display': '09000:09900:09990:09900:09000'}
>>> hub.sound.beep()
>>>We see that we moved the robot a bit (yaw is now 51).
The .TAB trick made us find the beep command, which works!
The REPL help suggests to use the hub module.
However, the LEGO app suggest to use mindstorms.MSHub.
And a dir of both shows they are different.
This is very confusing.
With the help("modules") we found the hub module.
But it also gave the hint Plus any modules on the filesystem.
And we see there is a module uos for basic "operating system" services.
This micro-OS includes a filesystem!
>>> import uos
>>> uos.listdir('/')
['projects', 'runtime', 'system', '_api', 'commands', 'event_loop', 'mindstorms'
, 'programrunner', 'protocol', 'sounds', 'spike', 'ui', 'util', 'boot.py', 'hub_
runtime.mpy', 'main.py', 'version.py', '.runtime_hash', 'extra_files', '.extra_f
iles_hash', 'bt-lk1.dat', 'bt-lk2.dat', 'runtime.log']
>>> uos.listdir('/mindstorms')
['__init__.mpy', 'control.mpy', 'operator.mpy', 'util.mpy']
>>> print( open('/mindstorms/__init__.mpy','r').read() )
M uP
,mindstorms/__init__.py€apii€"large_technic_hub*T2
MSHubLargeTechnicHub4QcT
Qc
>>>Reading the file __init__.mpy is not very succseful.
An mpy file is "a binary container file format that holds precompiled code, and which can be imported like a normal .py module",
see doucmentation.
But its presence is important: we have a directory mindstorms with a file __init__.[m]py, and this means we have a package:
"The __init__.py files are required to make Python treat directories containing the file as packages.", see documentation.
We even see the string MSHub in the __init__.mpy. Let's try to import and get the yaw.
>>> from mindstorms import MSHub
>>> h=MSHub()
>>> h.motion_sensor.get_yaw_angle()
50
>>> h.motion_sensor.get_yaw_angle()
62
>>>Success.
We can now do in REPL what we do in the LEGO app.
Still confused about the difference between import hub and from mindstorms import MSHub.
See the question "Why are there so many ways to do ... in Python?"
Since there is a micro OS (uos module) which supports a file system, we can list all files. I wrote this Python script
import os
def ls(dir='/',indent='') :
if dir and dir[-1]!='/' : dir+='/'
for entry in os.listdir(dir):
stat=os.stat(dir+entry)
if stat[0]==16384 :
print(indent+entry+'/')
ls(dir+entry+'/',indent+' ')
if stat[0]==32768 :
print(indent+entry, stat[6])
def cat(filename):
with open(filename,'r') as file :
return file.read()How do I get that on the hub?
- Connect via UART as above.
- Don't forget to press ^C to get the REPL prompt.
- Copy the above Python script with the extra whiteline at the end (as in get it in the clipboard - ^C).
- In REPL goto paste mode by pressing ^E (see
help()). - Paste the Python script (as in paste the clipboard).
- Finish paste mode ^D (see help line at start of paste mode).
- After that, we test with
dir()thatlsandcatare present. - Then we execte both.
The whole session looks like this, but I have removed large chunks to keep the overview
MicroPython v1.11-1139-gf7407e5a0 on 2020-06-19; LEGO Technic Large Hub with STM32F413xx
Type "help()" for more information.
>>>
# Pressed ^E here to enter paste mode
paste mode; Ctrl-C to cancel, Ctrl-D to finish
===
# Pasted the two function defs
===
# pressed ^D here to finish paste mode
>>> dir()
['os', '__name__', 'ls', 'hub_runtime', 'gc', 'micropython', 'cat']
>>> ls()
projects/
22622.py 4742
27602.py 228
runtime/
extensions/
__init__.mpy 197
music.mpy 322
sound.mpy 372
weather.mpy 1220
__init__.mpy 130
multimotor.mpy 302
stack.mpy 901
timer.mpy 141
mindstorms/
__init__.mpy 135
control.mpy 58
operator.mpy 60
util.mpy 52
sounds/
menu_click 13632
menu_fastback 17584
menu_program_start 15832
menu_program_stop 34000
menu_shutdown 65706
startup 39682
spike/
__init__.mpy 133
control.mpy 53
operator.mpy 55
util.mpy 47
boot.py 0
hub_runtime.mpy 2015
main.py 118
version.py 54
extra_files/
Affirmative 49108
Damage 30370
Error 11470
Ping 32052
Strike 25182
runtime.log 232
>>> cat('main.py')
'import gc\nimport micropython\n\nimport hub_runtime\n\nmicropython.alloc_emergency_exception_buf(256)\n\nhub_runtime.start()\n'
>>>I have logged the output of ls.
Every directory that has an __init__.mpy is very likely a Python package.
This holds for every (?) directory except extra_files which seems to host the sounds.
The boot.py is run by micro python each time the hub boots.
After that, it runs main.py. The former file is empty (note the 0 size after the name).
The hub_runtime.start() is the program that spits out the data when we log in (which we stopped with ^C).
I used this script when a peripheral is connected to port A.
import hub,time
def infoA():
for key,val in hub.port.A.info().items():
if key=='modes':
for i, v in enumerate( val ):
print(key+"["+str(i)+"]=",v)
time.sleep(0.1)
else :
print(key+"=",val)When I connect the light sensor, this is the output of infoA()
fw_version= 268435456
modes[0]= {'symbol': 'IDX', 'format': {'datasets': 1, 'type': 0, 'figures': 2, 'decimals': 0}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'COLOR', 'pct': (0.0, 100.0), 'map_in': 228, 'si': (0.0, 10.0), 'raw': (0.0, 10.0)}
modes[1]= {'symbol': 'PCT', 'format': {'datasets': 1, 'type': 0, 'figures': 3, 'decimals': 0}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'REFLT', 'pct': (0.0, 100.0), 'map_in': 48, 'si': (0.0, 100.0), 'raw': (0.0, 100.0)}
modes[2]= {'symbol': 'PCT', 'format': {'datasets': 1, 'type': 0, 'figures': 3, 'decimals': 0}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'AMBI' , 'pct': (0.0, 100.0), 'map_in': 48, 'si': (0.0, 100.0), 'raw': (0.0, 100.0)}
modes[3]= {'symbol': 'PCT', 'format': {'datasets': 3, 'type': 0, 'figures': 3, 'decimals': 0}, 'capability': b'@\x00\x00\x00\x05\x04', 'map_out': 16, 'name': 'LIGHT', 'pct': (0.0, 100.0), 'map_in': 0, 'si': (0.0, 100.0), 'raw': (0.0, 100.0)}
modes[4]= {'symbol': 'RAW', 'format': {'datasets': 2, 'type': 1, 'figures': 4, 'decimals': 0}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'RREFL', 'pct': (0.0, 100.0), 'map_in': 16, 'si': (0.0, 1024.0), 'raw': (0.0, 1024.0)}
modes[5]= {'symbol': 'RAW', 'format': {'datasets': 4, 'type': 1, 'figures': 4, 'decimals': 0}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'RGB I', 'pct': (0.0, 100.0), 'map_in': 16, 'si': (0.0, 1024.0), 'raw': (0.0, 1024.0)}
modes[6]= {'symbol': 'RAW', 'format': {'datasets': 3, 'type': 1, 'figures': 4, 'decimals': 0}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'HSV' , 'pct': (0.0, 100.0), 'map_in': 16, 'si': (0.0, 360.0), 'raw': (0.0, 360.0)}
modes[7]= {'symbol': 'RAW', 'format': {'datasets': 4, 'type': 1, 'figures': 4, 'decimals': 0}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'SHSV' , 'pct': (0.0, 100.0), 'map_in': 16, 'si': (0.0, 360.0), 'raw': (0.0, 360.0)}
modes[8]= {'symbol': 'RAW', 'format': {'datasets': 4, 'type': 1, 'figures': 4, 'decimals': 0}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'DEBUG', 'pct': (0.0, 100.0), 'map_in': 16, 'si': (0.0, 65535.0), 'raw': (0.0, 65535.0)}
modes[9]= {'symbol': '' , 'format': {'datasets': 7, 'type': 1, 'figures': 5, 'decimals': 0}, 'capability': b'@@\x00\x00\x04\x84' , 'map_out': 0, 'name': 'CALIB', 'pct': (0.0, 100.0), 'map_in': 0, 'si': (0.0, 65535.0), 'raw': (0.0, 65535.0)}
speed= 115200
hw_version= 268435456
combi_modes= (99,)
type= 61When I connect the distance sensor, this is the output
fw_version= 268435456
modes[0]= {'symbol': 'CM' , 'format': {'datasets': 1, 'type': 1, 'figures': 5, 'decimals': 1}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'DISTL', 'pct': (0.0, 100.0), 'map_in': 145, 'si': (0.0, 250.0), 'raw': (0.0, 2500.0)}
modes[1]= {'symbol': 'CM' , 'format': {'datasets': 1, 'type': 1, 'figures': 4, 'decimals': 1}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'DISTS', 'pct': (0.0, 100.0), 'map_in': 241, 'si': (0.0, 32.0), 'raw': (0.0, 320.0)}
modes[2]= {'symbol': 'CM' , 'format': {'datasets': 1, 'type': 1, 'figures': 5, 'decimals': 1}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'SINGL', 'pct': (0.0, 100.0), 'map_in': 144, 'si': (0.0, 250.0), 'raw': (0.0, 2500.0)}
modes[3]= {'symbol': 'ST' , 'format': {'datasets': 1, 'type': 0, 'figures': 1, 'decimals': 0}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'LISTN', 'pct': (0.0, 100.0), 'map_in': 16, 'si': (0.0, 1.0), 'raw': (0.0, 1.0)}
modes[4]= {'symbol': 'uS' , 'format': {'datasets': 1, 'type': 2, 'figures': 5, 'decimals': 0}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'TRAW' , 'pct': (0.0, 100.0), 'map_in': 144, 'si': (0.0, 14577.0), 'raw': (0.0, 14577.0)}
modes[5]= {'symbol': 'PCT', 'format': {'datasets': 4, 'type': 0, 'figures': 3, 'decimals': 0}, 'capability': b'@ \x00\x00\x04\x84' , 'map_out': 16, 'name': 'LIGHT', 'pct': (0.0, 100.0), 'map_in': 0, 'si': (0.0, 100.0), 'raw': (0.0, 100.0)}
modes[6]= {'symbol': 'PCT', 'format': {'datasets': 1, 'type': 0, 'figures': 1, 'decimals': 0}, 'capability': b'@\x80\x00\x00\x04\x84', 'map_out': 144, 'name': 'PING' , 'pct': (0.0, 100.0), 'map_in': 0, 'si': (0.0, 1.0), 'raw': (0.0, 1.0)}
modes[7]= {'symbol': 'PCT', 'format': {'datasets': 1, 'type': 1, 'figures': 4, 'decimals': 0}, 'capability': b'@\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'ADRAW', 'pct': (0.0, 100.0), 'map_in': 144, 'si': (0.0, 1024.0), 'raw': (0.0, 1024.0)}
modes[8]= {'symbol': 'PCT', 'format': {'datasets': 7, 'type': 0, 'figures': 3, 'decimals': 0}, 'capability': b'@@\x00\x00\x04\x84' , 'map_out': 0, 'name': 'CALIB', 'pct': (0.0, 100.0), 'map_in': 0, 'si': (0.0, 255.0), 'raw': (0.0, 255.0)}
speed= 115200
hw_version= 268435456
combi_modes= ()
type= 62When I connect the touch (force) sensor, this is the output
fw_version= 268435456
modes[0]= {'symbol': 'N' , 'format': {'datasets': 1, 'type': 0, 'figures': 4, 'decimals': 1}, 'capability': b'\x00\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'FORCE', 'pct': (0.0, 100.0), 'map_in': 112, 'si': (0.0, 10.0), 'raw': (0.0, 100.0)}
modes[1]= {'symbol': 'ST' , 'format': {'datasets': 1, 'type': 0, 'figures': 1, 'decimals': 0}, 'capability': b'\x00\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'TOUCH', 'pct': (0.0, 100.0), 'map_in': 4, 'si': (0.0, 1.0), 'raw': (0.0, 1.0)}
modes[2]= {'symbol': 'TEV', 'format': {'datasets': 1, 'type': 0, 'figures': 1, 'decimals': 0}, 'capability': b'\x00\x80\x00\x00\x04\x84', 'map_out': 0, 'name': 'TAP' , 'pct': (0.0, 100.0), 'map_in': 4, 'si': (0.0, 3.0), 'raw': (0.0, 3.0)}
modes[3]= {'symbol': 'N' , 'format': {'datasets': 1, 'type': 0, 'figures': 4, 'decimals': 1}, 'capability': b'\x00\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'FPEAK', 'pct': (0.0, 100.0), 'map_in': 16, 'si': (0.0, 10.0), 'raw': (0.0, 100.0)}
modes[4]= {'symbol': 'RAW', 'format': {'datasets': 1, 'type': 1, 'figures': 4, 'decimals': 0}, 'capability': b'\x00\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'FRAW' , 'pct': (0.0, 100.0), 'map_in': 16, 'si': (0.0, 1023.0), 'raw': (0.0, 1023.0)}
modes[5]= {'symbol': 'RAW', 'format': {'datasets': 1, 'type': 1, 'figures': 4, 'decimals': 0}, 'capability': b'\x00\x00\x00\x00\x04\x84', 'map_out': 0, 'name': 'FPRAW', 'pct': (0.0, 100.0), 'map_in': 16, 'si': (0.0, 1023.0), 'raw': (0.0, 1023.0)}
modes[6]= {'symbol': '' , 'format': {'datasets': 8, 'type': 1, 'figures': 4, 'decimals': 0}, 'capability': b'\x00@\x00\x00\x04\x84' , 'map_out': 0, 'name': 'CALIB', 'pct': (0.0, 100.0), 'map_in': 0, 'si': (0.0, 1023.0), 'raw': (0.0, 1023.0)}
speed= 115200
hw_version= 268435456
combi_modes= (63,)
type= 63When I connect the 3x3 LED matrix (bought separately), this is the output
combi_modes= ()
fw_version= 285212672
speed= 115200
modes[0]= {'symbol': 'PCT', 'format': {'datasets': 1, 'type': 0, 'figures': 1, 'decimals': 0}, 'capability': b'\x80\x00\x00\x00\x05\x04', 'map_out': 80, 'name': 'LEV O', 'pct': (-100.0, 100.0), 'map_in': 0, 'si': (-9.0, 9.0), 'raw': (-9.0, 9.0)}
modes[1]= {'symbol': 'PCT', 'format': {'datasets': 1, 'type': 0, 'figures': 2, 'decimals': 0}, 'capability': b'\x80\x00\x00\x00\x05\x04', 'map_out': 68, 'name': 'COL O', 'pct': (0.0, 100.0), 'map_in': 0, 'si': (0.0, 10.0), 'raw': (0.0, 10.0)}
modes[2]= {'symbol': ' ', 'format': {'datasets': 9, 'type': 0, 'figures': 3, 'decimals': 0}, 'capability': b'\x80\x00\x00\x00\x05\x04', 'map_out': 16, 'name': 'PIX O', 'pct': (0.0, 100.0), 'map_in': 0, 'si': (0.0, 170.0), 'raw': (0.0, 170.0)}
modes[3]= {'symbol': ' ', 'format': {'datasets': 1, 'type': 0, 'figures': 1, 'decimals': 0}, 'capability': b'\x80\x00\x00\x00\x05\x04', 'map_out': 16, 'name': 'TRANS', 'pct': (0.0, 100.0), 'map_in': 0, 'si': (0.0, 2.0), 'raw': (0.0, 2.0)}
uid= bytearray(b'\x00k\x000\x18G033798\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00')
type= 64
hw_version= 4
>>>When I connect a (small) motor, this is the output
fw_version= 4096
modes[0]= {'symbol': 'PCT' , 'format': {'datasets': 1, 'type': 0, 'figures': 1, 'decimals': 0}, 'capability': b'\x10\x00\x00\x00\x01\x04', 'map_out': 16, 'name': 'POWER', 'pct': (-100.0, 100.0) , 'map_in': 0, 'si': (-100.0, 100.0) , 'raw': (-100.0, 100.0)}
modes[1]= {'symbol': 'PCT' , 'format': {'datasets': 1, 'type': 0, 'figures': 4, 'decimals': 0}, 'capability': b'!\x00\x00\x00\x01\x04' , 'map_out': 16, 'name': 'SPEED', 'pct': (-100.0, 100.0) , 'map_in':16, 'si': (-100.0, 100.0) , 'raw': (-100.0, 100.0)}
modes[2]= {'symbol': 'DEG' , 'format': {'datasets': 1, 'type': 2, 'figures': 4, 'decimals': 0}, 'capability': b'$\x00\x00\x00\x01\x04' , 'map_out': 8, 'name': 'POS' , 'pct': (-100.0, 100.0) , 'map_in': 8, 'si': (-360.0, 360.0) , 'raw': (-360.0, 360.0)}
modes[3]= {'symbol': 'DEG' , 'format': {'datasets': 1, 'type': 1, 'figures': 3, 'decimals': 0}, 'capability': b'"\x00\x00\x00\x01\x04' , 'map_out': 8, 'name': 'APOS' , 'pct': (-200.0, 200.0) , 'map_in': 8, 'si': (-180.0, 179.0) , 'raw': (-180.0, 179.0)}
modes[4]= {'symbol': 'PCT' , 'format': {'datasets': 1, 'type': 0, 'figures': 1, 'decimals': 0}, 'capability': b' @\x00\x00\x01\x04' , 'map_out': 8, 'name': 'LOAD' , 'pct': (0.0, 100.0) , 'map_in': 8, 'si': (0.0, 127.0) , 'raw': (0.0, 127.0)}
modes[5]= {'symbol': '\x01\x04\x01', 'format': {'datasets': 0, 'type': 0, 'figures': 0, 'decimals': 194}, 'capability': b'\x00\x00\x00\x00\x00\x00', 'map_out': 0, 'name': '1' , 'pct': (3444.96, 1.12104e-43), 'map_in': 0, 'si': (0.0, 2.24208e-44), 'raw': (5.73972e-42, 5.73972e-42)}
speed= 115200
hw_version= 4096
combi_modes= (14, 15)
type= 75I guess type=75 denotes a motor. An important aspect of the modes is the name: POWER, SPEED, POS, APOS, LOAD, 1.
Here is a small overview.
| sensor | type | names |
|---|---|---|
| light | 61 | COLOR, REFLT, AMBI, LIGHT, RREFL, RGB I, HSV, SHSV, DEBUG, CALIB |
| distance | 62 | DISTL, DISTS, SINGL, LISTN, TRAW, LIGHT, PING, ADRAW, CALIB |
| force | 63 | FORCE, TOUCH, TAP, FPEAK, FRAW, FPRAW, CALIB |
| 3x3 LED | 64 | LEV O, COL O, PIX O, TRANS |
| motor (S) | 75 | POWER, SPEED, POS, APOS, LOAD, 1 |
I do not fully understand the modes. Some hints
namegives the name of the mode such asTRANSorPOWER.symbolgives the unit, such asPCT(percent),DEG(degree),N(newton).formatdescribes the data associated with the modedatasetsgives the number of values in the mode (e.g. 1 forCOL Obut 9 forPIX O)typegives the datatype of each value (0=char=8bits, 1=short=16bits, 2=int=32bits, 3=float=32bits)figuresgives the number of characters needed to display the valuedecimalsgives the number of decimal places needed to display the value
capabilitydo not understandmap_outdo not understandmap_indo not understandpct,si,rawsomehow gives the ranges of the values in this mode in various units (percent, signed int (?), raw)
Since the MicroPython environment has a filesystem, we can log data to a file. Just standard Python ... you would expect. I stumbled on one tricky thing, an error "object with buffer protocol required".
I believe the root cause is that MicroPython does not support writing numbers, only strings to files (they have the "characters in a buffer").
The below program takes 10 light measurements (2 seconds appart), converts each measurement to a string, and writes that to a file data.log.
Each measurement it gives a beep.
from mindstorms import ColorSensor
from mindstorms import MSHub
from mindstorms.control import wait_for_seconds
print("datalog")
hub = MSHub()
light = ColorSensor('E')
with open('data.log','w') as logfile:
for num in range(10):
sample = light.get_ambient_light()
line = str(num) + ' ' + str(sample)
print(line)
logfile.write(line+'\n')
wait_for_seconds(2)
hub.speaker.beep()Notes
-
Program suffers from not ending (see question "How to stop my Python program?")
-
I passed just a filename in the example, but you can specify a full path.
-
The file
data.loghas no path, so it is written to the current directory. As it turns out, that is the root. -
How do I find my file? In the question "Which files are in the Python filesystem?" you'll find an
ls()command, which works in REPL. If you run that, we get the following file list (abridged). At the end we find ourdata.log.>>> ls() projects/ ... .extra_files_hash 539 bt-lk1.dat 69 bt-lk2.dat 69 runtime.log 240 data.log 41
-
How do I "get the contents" of my file? In the question "Which files are in the Python filesystem?" you'll find a
cat()command, which works in REPL. If you run that, we get the following content.>>> cat('data.log') '0 1\n1 12\n2 7\n3 7\n4 5\n5 4\n6 6\n7 5\n8 4\n9 4\n'
-
To get them to your PC, you need someting like the spike tools. To be investigated.
-
To delete the log file use e.g. (in REPL)
import os os.remove('data.log')
Which functions are hidden in Python modules?
Somebody made a dump.
Similar in pdf.
(end)