2023年《SE3356 云操作系统设计与实践》课程第一小组项目,简易的Kubernetes容器编排工具,通过go语言实现。
![]()
minik8s 简易的容器编排工具

小组成员如下:
| 姓名 | 学号 | 邮箱 | 成员 | 贡献度 |
|---|---|---|---|---|
| 董云鹏 | 517021910011 | @dongyunpeng-sjtu | 组长 | 30% |
| 冯逸飞 | 520030910021 | @every-breaking-wave | 组员 | 35% |
| 张子谦 | 520111910121 | @Musicminion | 组员 | 35% |
详细分工:

项目仓库的地址:
项目文档的在线网站
项目的CI/CD主要在Github上面运行,所以如有需要查看,请移步到Github查看。
- github.com/docker/docker 底层容器运行时的操作
- github.com/pallets/flask Serveless容器内的运行的程序
- github.com/gin-gonic/gin APIServer框架
- github.com/fatih/color minik8s的分级日志系统
- github.com/klauspost/pgzip 用户文件的zip压缩
- github.com/melbahja/goph GPU Job的SSH的客户端
- github.com/mholt/archiver Docker镜像打包时用到的tar压缩
- go.etcd.io/etcd/client/v3 和Etcd存储交互操作的客户端
- gopkg.in/yaml.v3 go的yaml文件解析
- gotest.tools/v3 项目测试框架
- docker/login-action CICD自动推送镜像到dockerHub
- docker/setup-qemu-action CICD交叉编译平台
- github.com/google/uuid API对象UUID的生成
- github.com/spf13/cobra Kubectl的命令行工具
- github.com/jedib0t/go-pretty/table Kubectl美化输出
- github.com/coreos/go-iptables/iptables 封装了对iptables的修改操作
开发语言:Golang。我们项目主要采用go语言(版本1.20)进行开发。之所以选择go语言,因为docker、k8s也是基于go开发的,并且docker提供了go相关的sdk,让我们轻松就能将项目接入,实现通过go语言来操作底层的容器运行、获取运行状态等信息。另外go语言本身具有很好的容错能力,通过强制检查返回值err的方式,也让错误报错更加友好。
项目架构:我们的项目架构学习了K8s的架构,同时又适应需求做了一定的微调。整体主要是由:控制平面和Worker节点的两大类组成。运行在控制平面的组件主要有下面的几个:
- API Server:提供一系列Restful的接口,例如对于API对象的增删改查接口,供其他组件使用
- Controller:包括DNS Controller、HPA Controller、Replica Controller、JobController,主要是对于一些抽象级别的API对象的管理,状态的维护。
- Scheduler:负责从所有的可以使用的节点中,根据一定的调度策略,当收到Pod调度请求时,返回合适的节点
- Serveless:单独运行的一个服务器,负责维护Serveless的函数相关对象的管理,同时负责转发用户的请求到合适的Pod来处理
- RabbitMQ:作为消息队列,集群内部的进程间通讯工具
运行在WorkerNode上面的主要有下面的几个组件
- kubeproxy:负责DNS、Iptable的修改,维护Service的状态等
- Kubelet:维护Pod的底层创建,Pod生命周期的管理,Pod异常的重启/重建等
- Redis:作为本地的缓存Cache,哪怕API-Server完全崩溃,因为有本地的Redis,机器重新启动之后,Kubelet也能够恢复之前容器的状态

项目分支:我们的开发采用多分支进行。每一个功能点对应一个Feature分支(对于比较复杂的功能分支可能会有不同组员自己的Branch),所有的推送都会经过go test的测试检验。并可以在这里查看详细的情况。
项目一共包含主要分支包括
- Master分支:项目的发行分支,只有通过了测试, 才能通过PR合并到Master分支。
- Development分支:开发分支,用于合并多个Feature的中间分支,
- Feature/* 分支:功能特定分支,包含相关功能的开发分支
如下图所示,是我们开发时候的Pr合并的情况。所有的Pr都带有相关的Label,便于合并的时候审查。考虑到后期的合并比较频繁,我们几乎都是每天都需要合并最新的工作代码到Development分支,然后运行单元测试。测试通过之后再合并到Master分支。

CI/CD介绍:CI/CD作为我们软件质量的重要保证之一。我们通过Git Action添加了自己的Runner,并编写了项目的测试脚本来实现CI/CD。保证每次运行前环境全部初始化。
- 所有的日常代码的推送都会被发送到我们自己的服务器,运行单元测试,并直接显示在单次推送的结果后方
- 当发起Pr时,自动会再一次运行单元测试,测试通过之后才可以合并
- 运行单元测试通过之后,构建可执行文件,发布到机器的bin目录下
- 以上2,3条通过之后,对于合并到Master的情况,会构建docker相关的镜像(例如GPU Job的docker镜像、Function的基础镜像)推送到dockerhub
软件测试介绍:go语言自身支持测试框架。并且鼓励把项目文件和测试文件放在同一个文件夹下面。例如某一个项目的文件是file.go,那么测试的文件的名字就是file_test.go。最终要运行整个项目测试的时候,只需要在项目的根目录运行 go test ./... 即可完成整个项目的测试。测试会输出详细的测试通过率,非常方便。
功能开发流程:
- 我们的软件开发基于迭代开发、敏捷开发。小组成员每天晚上在软件学院大楼实验室集中进行开发新功能,减少沟通障碍,做到有问题及时解决、沟通,有困难相互请教,这也大大的提高了我们小组的效率。截止15周周末,我们已经完成了所有的功能的开发。基本符合预期进度。
- 对于新功能开发,我们采用"动态分配"方法,根据进度灵活分配成员的任务。项目框架搭建好之后,基本上在任何时间点小组同时在开发两个或者两个以上的需求。一人开发完成之后,交给另外一个组员完成代码的审查和测试,测试通过之后合并到Master
- 功能开发的过程主要是:简要的需求分析->设计API对象->设计API-Server的接口->设计Etcd存储情况->编写该需求的运行逻辑代码->编写Kubectl相关代码->最终测试
- 具体如下图所示,在整个开发的流程中,我们基本都是在重复下面的流程图。

- 当然我们在开发的过程中也在及时更新文档,如下图所示,是我们的API-Server的详细接口文档,便于组员之间了解对方的开发情况

开发简介:
- 项目代码体量大约2w行代码,开发周期大约1.5月
- 完成要求里面的全部功能
API-Server:API Server是minik8s控制平面的核心。主要负责和etcd存储交互,并提供一些核心的APIObject的API,供其他组件使用。在设计API Server的API时候,我们主要考虑了两个特性,一个是状态(Status)和期望(Spec)分离的情况,另外一个是Etcd的路径和API分离。
如果没有分离,我们考虑下面的情景:当一个Kubelet想要更新某一个Pod的状态的时候,试图通过Post或者Put请求写入一个完整的Pod对象,在此之前,假如用户刚刚通过kubectl apply更新了一个Pod的信息,如果按照上面我所叙述的时间线,就会出现用户的apply的更新的Pod被覆盖了。同样的道理,如果用户删除了一个Pod,按照上面的设计,Kubelet在回传的时候写入了一个完整的Pod,相当于没有做任何的删除。
虽然说上面的例子是因为期望和状态没有分离,但是本质是Kubelet的权限太大,能够写入一个完整的Pod。所以为了解决这种问题,我们对于一个对象,往往设计了更新对象接口(更新整个对象),更新对象的状态接口(仅仅更新Status,如果找不到对象那么就不更新)
第二个设计时分开了API的格式和Etcd存储API对象的路径。Etcd存储API对象的路径都是诸如registry/pods/<namespace>/<name>,而API的格式大多都是/api/v1/pods/namespaces/:namespace/name/:name,可以看到两者的差别还是比较明显的,这是因为API版本看发生动态变化(在实际的k8s中也是这样),但是存储的路径保证兼容原来的。所以在我们的minik8s中,我们同样借鉴了这样的思路。
更多有关API-Server的内容以及详细的API文档,请移步到/pkg/apiserver下的Readme查看。
Kubelet:Kubelet是和容器底层运行交互的组件,确保每一个Pod能够在该节点正常运行。目前Kubelet架构设计如下(我们参考了k8s的反馈路径设计并做了一定的微调,以适应项目)
- Kubelet主要由:StatusManager、RunTimeManager、PlegManager、WorkerManager几个核心组件和Pleg、MsgChan的通道组成。
- RunTimeManager和底层的Docker交互,用于创建容器、获取容器运行的状态、管理镜像等操作
- WorkerManager用于管理Worker,我们的策略是每一个Pod分配一个Worker,然后由WorkerManager进行统一的调度和分配。每一个Worker有他自己的通道,当收到Pod的创建或者删除任务的时候,就会执行相关的操作
- PlegManager用来产生Pleg(Pod LifeCycle Event),发送到PlegChan。PlegManager会调用StatusManager,比较缓存里面的Pod的情况和底层运行的Pod的情况,产生相关的事件。
- ListWatcher会监听属于每个Node的消息队列,当收到创建/删除Pod的请求的时候,也会发送给相关的WorkerManager
- 也就是说创建Pod会有消息队列/StatusManager检测到和远端不一致这样两种路径,前者的效率更高,后者用于维护长期的稳定。两者协同保证Pod的正确运行


具体来说,各个组件之间的行为和关系如下图详细所示。
- Runtime Manager会负责收集底层正在运行的所有的容器的信息,并把容器的信息组装为Pod的状态信息。同时收集当前机器的CPU/内存状态,把相关的信息回传到API Server,及时更新。
- Status Manager还会定期的从API Server拉取当前节点上所有的Pod,以便于比较和对齐,产生相关的容器生命周期事件(Pleg),
- Status Manager对于所有更新获取到的Pod,都会写入Redis的本地缓存,以便于API-Server完全崩溃和Kubelet完全崩溃重启的时候,Kubelet有Pod的期望信息,能够作为对齐目标
- 当出现Pod不一致的时候,以远端的API-Server的数据为主,并清除掉不必要的Pod。如下图所示,会清空不必要的Pod,并创建本地没有的Pod,实现和远端数据的对齐。

minik8s需要controller对一些抽象的对象实施管理。Controller是运行在控制平面的一个组件,具体包括DNS Controller、HPA Controller、Job Controller、Replica Controller。之所以需要Controller来对于这些API对象进行管理,是因为这些对象都是比较高度抽象的对象,需要维护已有的基础对象和他们之间的关系,或者需要对整个系统运行状态分析之后再才能做出决策。具体的逻辑如下:
- Replica Controller:维护Replica的数量和期望的数量一直,如果出现数量不一致,当通过标签匹配到的Pod数量较多的时候,会随机的杀掉若干Pod,直到数量和期望一致;当通过标签匹配到的Pod数量偏少的时候,会根据template创建相关的Pod
- Job Controller:维护GPU Job的运行,当一个新的任务出现的时候,会被GPU JobController捕捉到(因为这个任务没有被执行,状态是空的),然后Controller会创建一个新的Pod,让该Pod执行相关的GPU任务。
- HPA Controller:分析HPA对应的Pod的CPU/Mem的比例,并计算出期望的副本数,如果当前副本和期望数量不一致,就会触发扩容或者缩容。所有的扩容、缩容都是以一个Pod为单位进行的,并且默认的扩容/缩容的速度是15s/Pod。如果用户自己指定了扩缩容的速度,那么遵循用户的规则。
- DNS Controller:负责nginx service的创建,同时监听Dns对象的变化,当有Dns变化时会向所有的node发送hostUpdate以更新nginx的配置文件和hosts文件
Kubectl是minik8s的命令行交互工具,命令的设计基本参考kubernates。我们使用了Cobra的命令行解析工具,大大提高了命令解析的效率。

支持的命令如下所示:
Kubectl apply ./path/to/your.yaml创建一个API对象,会自动识别文件中对象的Kind,发送给对应的接口Kubectl delete ./path/to/your.yaml根据文件删除一个API对象,会自动识别文件中对象的name和namespace,发送给对应的接口(删除不会校验其他字段是否完全一致)kubectl get [APIObject] [Namespace/Name]获取一个API对象的状态(显示经过简化的信息,要查看详细的结果,请使用Describe命令)kubectl update [APIObject] ./path/to/your.yaml, 更新一个API对象,会自动识别文件中对象的name和namespace,发送给对应的接口kubectl describe [APIObject] [Namespace]/[Name]获取一个API对象的详细的json信息(显示完整的经过优化的json字段)kubectl execute [Namespace]/[FunctionName] [parameters]触发一个Serveless的函数,并传递相关的参数,返回执行结果
另外,我们对所有指令的输出都进行了美化,并根据API对象的不同对输出内容进行了调整,以下为示例输出:


Scheduler是运行在控制平面负责调度Pod到具体Node的组件。Scheduler和API-Server通过RabbitMQ消息队列实现通讯。当有Pod创建的请求的时候,API-Server会给Scheduler发送调度请求,Scheduler会主动拉取所有Node,根据最新的Node Status和调度策略来安排调度。
目前我们的Scheduler支持多种调度策略:
- RoundRobin:轮询调度策略
- Random:随机调度策略
- LeastPod:选择Pod数量最少的节点
- LeastCpu:选择CPU使用率最低的作为调度目标
- LeastMem:选择Mem使用率最低的作为调度的目标
这些调度策略可以通过启动时候的参数进行指定。
Kubeproxy运行在每个Worker节点上,主要是为了支持Service抽象,以实现根据Service ClusterIP访问Pod服务的功能,同时提供了一定负载均衡功能,例如可以通过随机或者轮询的策略进行流量的转发。同时Kubeproxy还通过nginx实现了DNS和转发的功能。
目前Kuberproxy设计如下:
- Kuberproxy主要由IptableManager、DnsManager两个核心组件和serviceUpdateChan、DnsUpdateChan的通道组成。
- 当Kubeproxy启动后会向API-Server发送创建nginx pod的请求,并在之后通过nginx pod来进行反向代理
- IptableManager用于处理serviceUpdate, 根据service的具体内容对本机上的iptables进行更新,以实现ClusterIP到Pod的路由。
- DnsManager用于处理hostUpdate,这是来自DnsController的消息,目的是通知节点进行nginx配置文件和hosts文件的更新,以实现DNS和转发功能,不过由于实现上的考虑不足,DnsManager的这部分功能由Kubeproxy直接承担了。
Pod是k8s(minik8s)调度的最小单位。用户可以通过 Kubectl apply Podfile.yaml 的声明式的方法创建一个Pod。当用户执行该命令后,Kubectl会将创建Pod的请求发送给API-Server。API-Server检查新创建的Pod在格式、字段是否存在问题,如果没有异常,就会写入Etcd,并给Scheduler发送消息。
Scheduler完成调度之后,会通过消息队列通知API-Server,API-Server收到调度结果,将对应的Pod的nodename字段写入调度结果,然后保存回Etcd。然后主动给相关的Kubelet发送Pod的创建请求。
之前已经介绍到Kubelet创建Pod可以有两条途径,一条是长期拉取自己节点所有的Pod,另外一条途径是收到消息队列的创建请求之后主动创建。我们经过多次测试保证这两条途径不会冲突,因为在WorkManager底层是每一个Pod对应一个Worker,一旦收到了创建请求,再次收到创建请求的时候就会被忽略。Kubelet收到创建Pod请求之后,会把Pod的配置信息写入到本地的Redis里面,这样即使是API-Server崩溃,Kubelet出现重启,也能够保证Pod的信息可以读取到。
Pod创建之后,Kubelet的Status Manager会不断监视Pod的运行状态,并将状态更新写回到API-Server(通过Pod的Status的接口)。如果Pod中的容器发⽣崩溃或⾃⾏终⽌,首先PlegManager会通过StatusManager捕捉到Pod的异常状态,然后会产生Pod生命周期时间,通过PlegChan发送需要重启Pod的命令。然后WorkerManager收到之后会执行重启的操作。
pod内需要能运⾏多个容器,它们可以通过localhost互相访问。这一点我们是通过Pause容器实现的。将Pod相关的容器都加入pause容器的网络名字空间,这样就能实现同一个Pod里面的容器的通讯。至于PodIP的分配,我们使用了Weave网络插件,保证多机之间PodIP唯一的分配。
特别感谢这篇文章的精彩讲解,让我们了解了实现Pod内部容器的通讯。
具体创建Pod的时序图如下所示。

以下为示例yaml文件:
apiVersion: v1
kind: Pod
metadata:
labels:
app: service
name: pod-example1
namespace: default
spec:
containers:
- image: registry.cn-hangzhou.aliyuncs.com/tanjunchen/network-multitool:v1
name: test1
ports:
- containerPort: 80
resources:
requests:
memory: 100000000 # 单位为byte
limits:
memory: 200000000
- image: musicminion/func-base
name: test2
ports:
- containerPort: 18080
- image: docker.io/library/redis
name: test3
command: ["sh", "-c", "redis-server --appendonly yes"]使用方法:
kubectl apply pod.yaml
Minik8s⽀持Pod间通信,我们组选择了Weave网络插件,只需要通过简单的weave launch和weave connect等命令,就可以将一个节点加入到Weave网络集群里面。Weave插件会将容器与特定的IP绑定关联(weave attach命令绑定容器到Weave网络),实现多个Pod之间的通讯。同时Weave具有比较智能的回收功能,一旦某个容器被删除,相关的IP也会被回收,供下次再分配。
在Kubernetes中,应用在集群中作为一个或多个Pod运行, Service则是一种暴露网络应用的方法。在我们的设计里,Service被设计为一个apiObject, 用户可以通过 Kubectl apply Servicefile.yaml 的声明式的方法创建一个Service。
在Kubernetes中,部分pod会有属于自己的Label,这些pod创建时,API-Server会基于标签为它们创建对应的endpoint。当我们创建sevice时,会根据service的selector筛选出符合条件的endpoint,并将service和这些endpoint打包在一起作为serviceUpdate消息发送到所有Node的kubeproxy。
我们选择使用Iptables来实现proxy功能。当Kubeproxy收到service的更新消息后,会依据service和endpoint的ip信息更新本地的iptables,具体的更新方法参照了这篇文章, 出于简化的目的我们删去了一些规则,最终Iptables的设计如下:

此时访问service的规则流向为:
PREROUTING --> KUBE-SERVICE --> KUBE-SVC-XXX --> KUBE-SEP-XXX
Service和Pod的创建没有先后要求。如果先创建Pod,后创建的Service会搜索所有匹配的endpoint。如果先创建Service,后创建的pod创建对应的endpoint后会反向搜索所有匹配的Service。最终将上述对象打包成serviceUpdate对象发送给kubeproxy进行iptables的更新。
以下为示例yaml文件:
kind: Service
apiVersion: v1
metadata:
name: service-example
namespace: default
spec:
ports:
- name: http
port: 88 # service的端口
targetPort: 80 # 匹配的pod暴露的端口
protocol: tcp
selector:
app: service使用方法:
kubectl apply service.yaml
为了实现通过域名直接访问minik8s上service的功能,我们需要实现DNS与转发功能。这一部分由DNSController与Kubeproxy协作完成。
当Kubeproxy启动时,会向API-Server发送一个创建nginx pod的请求,当DNSController启动时,会向API-Server发送一个创建nginx service的请求。当用户创建dns对象后,API-Server会通知DNSController,DNSController会根据创建的dns的信息为nginx生成一份配置文件,示例如下:
server {
listen 80;
server_name test.com; # nginx service的域名
location /service1 {
proxy_pass http://192.168.160.168:88/; # 匹配的service的clusterIP
}
location /service2 {
proxy_pass http://192.168.121.186:88/;
}
}
此外,DNSController还会维护一个域名到ip的map,域名由dns指定,ip则是nginx的clusterIP。接着,DNSController会将以上信息发送给所有的Kubeproxy,Kubeproxy收到消息后,会进行hosts文件的更新,以便实现DNS功能,同时向nginx pod的挂载目录写入新的配置文件,并让nginx pod执行nginx -s reload命令,由此使得配置文件的更新生效。
这样,所有对以上域名的访问都会被变成对nginx service的访问,通过nginx service相关的iptables设置,流量会被转发到nginx pod上,之后nginx pod将会根据配置文件和子路径的匹配,将流量转发到对应的service的clusterIP上,从而实现了DNS与转发功能。
另外,为了实现pod内部也能正常地使用DNS服务,我们必须要使pod的hosts文件与节点上的保持一致,为了实现这一点有以下做法:
- 定期同步node与其上所有pod的hosts文件
- 在pod创建时或者dns更新时同步hosts文件
- 使所有的pod均挂载/etc/hosts目录
以上实现均可行,我们选择了第一种做法。
以下为示例yaml文件:
apiVersion: v1
kind: Dns
metadata:
name: test-dns
spec:
host: test.com
paths:
- subPath: /api/v2 # 子路径
svcName: service-example
svcPort: 88
使用方法:在nginx pod与nginx service创建好之后,使用以下命令:
kubectl apply dns.yaml
ReplicaSet可以用来创建多个Pod的副本。我们的实现是通过ReplicaSet Controller。通常来说创建的ReplicaSet都会带有自己的ReplicaSetSelector,用来选择Pod。ReplicaSet Controller会定期的从API-Server抓取全局的Pod和Replica数据,然后针对每一个Replica,检查符合状态的Pod的数量。如果数量发现小于预期值,就会根据Replica中的Template创建若干个新的Pod,如果发现数量大于预期值,就会将找到符合标签的Pod删去若干个(以达到预期的要求)
至于容错,我们放在了底层的Kubelet来实现。Pleg会定期检查运行在该节点的所有的Pod的状态,如果发现Pod异常,会自动重启Pod,保证Pod的正常运转。
以下为示例yaml文件:
apiVersion: v1
kind: Replicaset
metadata:
name: testReplica
spec:
replicas: 3
selector:
matchLabels:
labelkey1: labelvalue1
template:
metadata:
name: replicaPod
labels:
labelkey1: labelvalue1
spec:
containers:
- name: testContainer-1
image: docker.io/library/nginx
ImagePullPolicy: IfNotPresent
使用方法:
kubectl apply replicaset.yaml
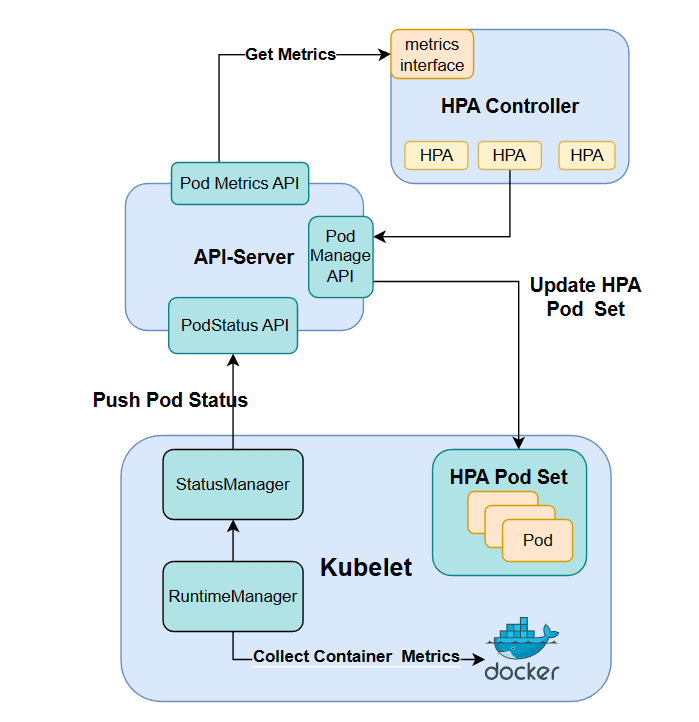
为了实现对Pod的动态伸缩控制,我们实现了HPA(Horizontal Pod Autoscaler)对象, 它选择Pod作为Workload,通过Selector筛选出对应Pod后,监测这些Pod的资源指标(在我们的实现中是CPU和Memory)并进行动态伸缩。
我们使用HPAController进行HPA对象与相应Pod的管理,HPAController会定期的从API-Server抓取全局的Pod和HPA数据,然后针对每一个HPA对象,检查它匹配的Pod的资源指标,并基于特定算法(具体算法见Horizontal Pod Autoscaling)计算出Pod的期望数量,然后将Pod的实例数向期望数量调整。简单来说,当Pod的平均资源使用量超标时则会扩容以降低平均平均负载,反之则会缩容。另外为了避免副本数变化过快,我们还进行了相应的速度限制。
我们直接通过docker client提供的接口抓取container的实时指标,并通过StatusManager定期的回传任务将指标写入到etcd的podStatus中,以下为实现动态伸缩的架构图:
HPA匹配Pod的容错同样交给了Kubelet来维持,因此HPAController只需要负责监测与调整即可。
以下为示例yaml文件:
apiVersion: v1
kind: Hpa
metadata:
name: test-hpa
spec:
minReplicas: 2
maxReplicas: 5
workload:
kind: Pod # hpa作用的的对象:Pod
metadata:
name: test-pod
namespace: test-namespace
adjustInterval: 15s # 扩缩容的速度限制
selector:
matchLabels:
app: hpa
metrics:
cpuPercent: 0.35 # 期望的平均cpu利用率
memPercent: 0.5 # 期望的内存利用率使用方法:
创建hpa对应的pod之后,执行以下命令:
kubectl apply hpa.yaml
GPU任务本质是通过Pod的隔离实现的。我们自己编写了GPU-Job-Server,并发布了arch64和arm64版本的镜像到Dockerhub。GPU-Job-Pod启动的时候,会被传递Job的namespace和name,该内置的服务器会主动找API-Server下载任务相关的文件和配置信息,根据用户指定的命令来生成脚本文件。
然后,GPU-Job-Server会使用用户提供的用户名、密码登录到交大的HPC平台,通过slurm脚本提交任务,然后进入等待轮寻的状态。当任务完成之后,会将任务的执行的结果从HPC超算平台下载,然后上传给API-Server,到此为止一个GPU的Job全部完成。
我们编写了简易的并行矩阵加法和乘法函数。时序图如下所示。

使用CUDA编程的情况下,我们首先定义了matrix_add和matrix_multiply两个使用__global__标记的核函数,矩阵加法和矩阵乘法使用的是正常的操作。为了显示出区别,A[i][j]和B[i][j]没有初始化成一样的数据,而是初始化成不同的数据,这样得到的C[ i ][ j ]能够检验我们的工作是否是正确的。
CUDA的风格类C,所以在处理矩阵这样的二维数组时需要两重指针,在进行host内存和device内存之间的数据转移。
cudaMemcpy((void *)dev_A, (void *)host_A, sizeof(int *) * M, cudaMemcpyHostToDevice);
cudaMemcpy((void *)dev_B, (void *)host_B, sizeof(int *) * M, cudaMemcpyHostToDevice);
cudaMemcpy((void *)dev_C, (void *)host_C, sizeof(int *) * M, cudaMemcpyHostToDevice);这里的cudaMemcpy函数作用是拷贝一段连续的内存,所以无法处理二重指针,需要辅助指针dev_A,dev_B和dev_C,也就是说我们共需要四类指针,host上的二重和一重指针,device上的二重和一重指针。
最终输出的效果如下所示:

示例yaml文件:
apiVersion: v1
kind: Job
metadata:
name: job-example1
namespace: test-job-namespace
spec:
partition: dgx2
nTasks: 1
nTasksPerNode: 6
submitDirectory: "change-me"
runCommands: [
"module load cuda/9.2.88-gcc-4.8.5",
"nvcc matrix_add.cu -o matrix_add",
"nvcc matrix_multiply.cu -o matrix_multiply",
"./matrix_add",
"./matrix_multiply",
]
outputFile: "job-example1.out"
errorFile: "job-example1.err"
username: "change-me"
password: "change-me"
gpuNums: 1使用方法:
kubectl apply job.yaml
Serverless功能点主要实现了两个抽象:Function和Workflow抽象,Function对应的是用户自己定义的python函数,而Workflow对应的是讲若干个Funcion组合起来,组成的一个工作流。工作流支持判断节点对于输出的结果进行判断,也支持路径的二分叉。
实现Function抽象我们主要是通过编写了一个自己的Function-Base镜像,该镜像同样支持Arm和X86_64。Function-Base镜像里面是一个简单的Python的Flask的服务器,会实现参数的解析,并传递给用户的自定义的函数。当我们创建一个Function的时候,我们首先需要拉取Function-Base镜像,然后将用户自定义的文件拷贝到镜像里面,再将镜像推送到minik8s内部的镜像中心(该镜像中心是通过docker启动了一个容器实现),当用户的函数需要创建实例的时候,本质是创建了一个ReplicaSet,用来创建一组Pod,这些Pod的都采用的上述推送到minik8s内部的镜像中心的镜像。
为了方便对于用户云函数请求的统一管理,我们在Serveless的程序里面添加了一个Server(或者理解为Proxy),当用户要通过统一的接口触发函数的时候,Serveless-Server会在自己的RouteTable里面查找相关函数对应的Pod的IP,然后将请求转发给相关的Pod,处理完成之后返回给用户。如果发现相关的Function对应的Replica数量为0,那么他还会触发Replica Resize的操作,把相关Replica的数量设置为大于0的数量。
显然,如果用户长期没有请求云函数,这个函数对应的Replica一段时间就会数量设置为0。当用户再次请求的时候,由于整个Replica的状态维护是有一个响应链的,数量的修改需要一段时间才能生效,所以不太可能让用户一请求就立马实现冷启动,然后立刻返回处理结果。如果没有实例。只会返回告知用户稍后再来请求,函数实例可能正在创建中。
对于Workflow,我们采用类似的WorkflowController,定期检查API-Server里面的Workflow,如果发现有任务栏没有被执行(也就是对应的Status里面的Result是空),Workflow Controller就会尝试执行这个工作流。
我们的工作流里面有两类节点,一个对应的是funcNode,也就是说这个节点对应的一个function,这时候Workflow Controller就会将上一步的执行结果(如果是第一个节点那就是工作流的入口参数)发送给对应namespace/name下的function来执行。另外一个类型节点对应的是optionNode,这个节点只会单纯对于上一步的执行结果进行判断。如果判断的结果是真,就会进入到TrueNextNodeName,如果判断的结果是假,就会进入到FalseNextNodeName。
以下为整个serverless的实现框架:

示例yaml文件:
-
function.yaml
apiVersion: v1 kind: Function metadata: name: func1 spec: userUploadFilePath: "/xx/example-1" # 计算任务所在目录 -
workflow.yaml
kind: Workflow apiVersion: v1 metadata: name: workflow-example namespace: default spec: entryParams: '{"x": 1, "y": 2}' entryNodeName: node1 workflowNodes: - name: node1 type: func # 节点类型,func为计算节点,choice为判断节点 funcData: funcName: func2 # x = x + y, y = x - y funcNamespace: default nextNodeName: node2 - name: node2 type: choice choiceData: trueNextNodeName: node3 falseNextNodeName: node4 checkType: numGreaterThan # if checkVar > 0, goto node3, else goto node4 checkVarName: y compareValue: 0 - name: node3 type: func funcData: funcName: func3 # x = x^2, y = y^2 funcNamespace: default - name: node4 type: func funcData: funcName: func1 # x = x - y, y = y - x funcNamespace: default
使用方法:
-
创建function
kubectl apply function.yaml -
触发对应function
kubectl execute [namespace]/[funcname] {args} -
创建对应workflow
kubectl apply workflow.yaml -
查看执行结果
kubectl get workflow [namespace]/[workflowname]
我们的容错性体现在以下两个方面:
-
应对控制面崩溃
有关pod的信息全部持久化在etcd存储中,有关service的路由配置则持久化在各节点的iptables中,dns的相关配置同样保存在各个节点的相应文件内。 当整个控制面(包括Apiserver,controller,scheduler)以及各个节点上的组件(包括Kubelet,Kubeproxy)发生崩溃时并不会导致相关数据的丢失,当以上应用重启后,pod与service仍然可以正常访问。
-
应对主从不一致
如果由于某些原因导致控制平面与worker节点上的pod状态不一致时,我们以控制平面的状态为准,具体做法如下:
-
Kubelet的StatusManager定期从控制平面拉取最新的pod的状态并持久化在Redis中
-
Kubelet的RuntimeManager定期从实际运行的容器中获取容器状态
-
PlegManager定期比较RuntimeManger与StatusManager获取的pod状态,根据比较结果产生相应事件
-
删除多余的pod
-
创建缺少的pod
-
重启丢失的container
-
-
我们的系统鲁棒性主要体现在可以处理错误输入与错误的文件格式,并设计了十分完善的错误提示,可以处理大小写错误,参数错误,参数丢失等问题,如图所示:

另外对于一些错误的提交也能正确地识别,包括文件格式错误,关键信息缺失或是重复创建等问题,如图所示:
关于助教对于我们触发Function的方式有疑问,我们的解释如下:
我们是通过kubectl实现的,kubectl的内部本质是通过发送http请求,触发函数,然后获得结果的。 要理解这个问题就需要详细的讲一讲我们的Serveless的设计的架构。
如下图所示,我们的Serveless主要是通过Serveless这个程序(运行在控制平面的一个进程)实现的,这个程序有下面的两个功能:
- 定期的拉取API-Server的Function的情况,和Function对应的ReplicaSet进行比较,并且记录每一段时间触发函数的数量,如果数量过少为0,那么就会Scale to zero
- 讲Http请求转发给相关的Pod。为了实现触发函数,Kubectl内置了
Execute命令,这个命令会向Serveless这个程序发送http请求,请求的URL是:/:funcNamespace/:funcName

- 如下所示,Kubectl发送请求会指定好对应的Function的Namespace和Name,然后Serverless这个程序内置了一个Server(或者说他的本质是一个Proxy,把来自Kubectl的请求,根据要调用的Function的Namespace和Name,转发给相关函数的Pod)。
- Serverless这个程序内置了一个Server会维护一个RouteTable,记录和一个Function相关的所有的Pod的IP,然后把请求转发给Pod的IP,收到结果之后,然后把函数的处理结果返回给Kubectl。这样用户就可以查看到函数调用的结果
- 如下面的代码所示,是Serverless程序内置的一个服务器,启动的时候暴露相关的接口,供Kubectl调用。
func (s *server) Run() {
// 周期性的更新routeTable
go executor.Period(RouterUpdate_Delay, RouterUpdate_WaitTime, s.updateRouteTableFromAPIServer, RouterUpdate_ifLoop)
// 周期性的检查function的情况,如果有新创建的function,那么就创建一个新的pod
go s.funcController.Run()
// 周期性的检查workflow的情况,如果有新创建的workflow,那么就创建一个新的pod
go s.workflowController.Run()
// 初始化服务器
s.httpServer.POST("/:funcNamespace/:funcName", s.handleFuncRequest)
s.httpServer.GET("/:funcNamespace/:funcName", s.checkFunction)
s.httpServer.Run(":" + strconv.Itoa(config.Serveless_Server_Port))
}- 在kubectl里面,发送请求的代码如下:
func executeHandler(cmd *cobra.Command, args []string) {
// 检查用户的传递的参数
if len(args) <= 1 {
fmt.Println("missing some parameters")
fmt.Println("Use like: kubectl execute" + " [namespace]/[name] [parameters]")
return
}
namespace, name, err := parseNameAndNamespace(args[0])
if err != nil {
fmt.Println(err)
return
}
if namespace == "" || name == "" {
fmt.Println("name of namespace or podName is empty")
fmt.Println("Use like: kubectl execute" + " [namespace]/[name] [parameters]")
return
}
// 解析参数
jsonString := args[1]
var jsonData map[string]interface{}
err = json.Unmarshal([]byte(jsonString), &jsonData)
if err != nil {
fmt.Println("解析JSON出错:", err)
return
}
// 向serveless server发送POST请求
// 组装一个URL,然后发送Post请求,调用函数为netrequest.PostRequestByTarget
URL := config.GetServelessServerURLPrefix() + "/" + namespace + "/" + name
code, res, err := netrequest.PostRequestByTarget(URL, jsonData)
if err != nil {
fmt.Println(err)
return
}
// 根据返回的结果,展示给用户调用的信息
if code != 200 {
fmt.Println("execute function failed, code:", code, "msg: ", res.(map[string]interface{})["msg"])
return
}
fmt.Println("execute function success, result:", res)
}关于助教对于我们能否通过
curl命令来触发函数,我们截图如下:
- 如下图所示,是通过curl发送POST请求给Serveless内置的Server,发送的请求体里面包含了json格式的调用参数,返回的结果是执行之后的处理结果。该Function的功能是计算
$x=x-y, y=y-x$ ,计算结果和返回的一致 - 具体的信息请参考下面的截图

关于助教对于我们Scale-to-0之后的,再次冷启动的时候,第一次返回的信息是立刻返回的,而不是等到相关Pod启动之后返回,我们的解释如下:
- Scale-to-0之后,再次恢复原来的Scale这个过程需要一定的时间,可能大概在10s左右或者稍微更长的时间。我们认为如果这个时候直接等待,可能会超过http请求的时间限制,导致用户体验不好,所以我们的设计是返回一个给用户的提示,让用户稍后再主动做请求,而不是完全等待相关的Pod启动之后,再发送请求把结果返回给用户。
Function对应的Pod是怎么实现的?怎么实现的Scale-to-zero?
- 我们的设计是每一个Function对应一个Replicaset,然后一个Replicaset管理一组相关的Pod。
- 当用户发送调用函数的请求的时候,我们基于Pod的IP,通过控制平面单独运行的Serveless程序内置的Proxy,把请求转发给相关的Pod。由于和Function相关的Pod的数量可能动态更新,所以Proxy内部维护了一张RouteTable,定期从API-Server更新最新的Pod的IP
- Scale-to-zero是通过统计每一个时间段内用户调用函数的请求的数量来实现的,如果一段时间没有调用函数,会把Replicaset的Pod的数量设置为0,这样就可以Scale-to-Zero。同样的道理,当有请求的时候,我们将Replicaset的Pod的数量设置为大于0的数值,就可以实现冷启动
hpa部分是否实现自定义扩缩容时间?
- 我们首先设定了一个默认得到扩缩容间隔时间(15s,可调节), hpaController每隔这样一段时间就会进行hpa的更新,这个过程中可能会进行扩缩容
- 用户可以在hpa的yaml文件中指定扩缩容间隔时间,实际执行时,如果发现用户的指定时间大于默认时间,则会将该hpa对应的goroutine协程睡眠这个时间差的时间