Un sistema operativo tiene que ser:
- Usable: claro y útil para el usuario
- Seguro: el sistema no puede caer si tenemos algún fallo (pondrá un mensaje de error)
- Eficiente: cada proceso quiere tener una sensación exclusiva, es decir, que la CPU solo trabaja para él.
Hay dos modos de acceder al Kernel:
- USER MODE: Por ejemplo, cuando hacemos llamamadas al sistema
- KERNEL MODE: Privilegiado. Por ejemplo, cuando ejecutamos llamadas al sistema (síncronas), cuando tenemos excepciones (asíncronas), interrupciones (síncronas), etc.
Se hacen desde el código (C, C++, ...). Éste lo envía al kernel para que lo ejecute. Son en USER MODE. Son simples de usar (en principio) Contexto NO modificable (los parámetros de cada función no son modificables) Ej: write(...)
Solo se ejecuta la llamada al sistema, recibida del código. Son en KERNEL MODE. Necesitan que entren parámetros y salgan unos valores. (write -> stdOut)

Nota: trap es el mismo proceso pero de diferente contexto.
Proceso: representación del S.O. de un programa en ejecución. Este es nuevo cada vez que ejecutamos.
Programa ejecutándose: tiene código, pila y datos, inicializa los reg de la CPU, da acceso a dispositivos (para el Kernel).
PCB (process control bank): gestiona la información de cada proceso. La PCB contiene 3 partes:
- Espacio de direcciones: (1) de código, pila y datos
- Contexto: (2) Software: pid, planificación, ppid, ... (3) Hardware: tabla de páginas, ...
Concurrencia: cuando dos procesos son concurrentes es que se ejecutan en paralelo. Aunque haya una sola CPU, hará el efecto virtual, ya que irá dando poco a poco a los procesos lo que necesitan, de forma que parezca que solo "trabaja" para uno.
Estados: un proceso puede tener diferentes estados (en zombie se queda el contxto, NO espacio de direcciones):

Propiedades del PCB:
- Identidad: PID, credenciales (USERID, GROUPID)
- Entorno: parámetros (argv, HOME, PATH,...)
- Contexto: estado, recursos, ... (durante ejecución)
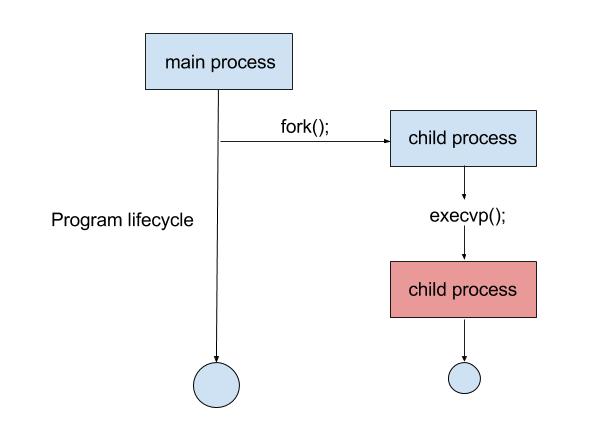
fork( ): crea un proceso hijo

execlp( ): cambia espacio de direcciones de un proceso (no contexto)
Cuando un proceso crea a otro, todo se organiza en estructura de árbol.
Cada proceso tiene su PID pero además también tiene el PPID para identificar a su padre.
El sistema operativo decide los recursos que comparte, su planificación y su espacio de direcciones.
UNIX --> padre e hijo se ejecutan concurrentemente (a la vez), se duplica el código, la pila y los datos del padre y se le asignan al hijo.
- fork -> crea un nuevo proceso (si es el hijo, devuelve 0, si es el padre, devuelve el PID del hijo)
- exec -> muta a otro programa (cambia el espacio de direcciones)
- exit -> termina el proceso
- wait / waitpid -> espera a que muera un proceso (esto bloquea el proceso: RUN -> BLOCKED / WAITING)
- getpid -> te da el PID
- getppid -> te da el PPID
- Código, datos, pila
- Programación de signals
- Máscara de signals
- Dispositivos virtuales (?)
- userID y groupID
- variables de entorno
- PID, PPID
- Contadores internos
- Alarmas y signals pendientes
Si quieres sincronizar el padre con la muerte del hijo haces que el padre espere su muerte con:
pid_t pid = fork();
int status = 0;
waitpid(pid, &status, 0);
// Si quieres más info sobre waitpid mira el archivo comandos.pdf
// que hay en la carpeta de Utilidades (SESIÓN 4)Mientras el padre no haga waitpid no se libera el espacio que ocupa el PCB del hijo muerto (ESTADO ZOMBIE). Si el padre muere sin liberar los PCB's de sus hijos el sistema los libera (proceso init).
Si queremos mutar a otro programa, se usa el comando execlp.
Si quieres más info sobre execlp mira el archivo comandos.pdf que hay en la carpeta de Utilidades
Execlp cambia todo el contenido del espacio, pero se mantiene la identidad del proceso.
int ret = fork();
if (ret == 0) {
// HIJO
}
else if (ret < 0) {
// ERROR
}
else {
// PADRE
// ret == pid del hijo
}Hasta que el hijo no acaba, el padre no crea otro proceso (porque se queda bloqueado en el waitpid esperando a que su hijo muera).
#define NUM_PROCESOS 2
int ret;
for (int i = 0; i < NUM_PROCESOS; i++)
{
ret = fork();
if (ret < 0)
control_error();
else if (ret == 0) {
// HIJO
exit(0);
}
else {
// PADRE
waitpid(-1, NULL, 0);
}
}El padre crea todos los procesos hijos que se ejecutan a la vez y después espera a que acaben todos.
#define NUM_PROCESOS 2
int ret;
for (int i = 0; i < NUM_PROCESOS; i++)
{
ret = fork();
if (ret < 0)
control_error();
else if (ret == 0) {
// HIJO
exit(0);
}
}
while (waitpid(-1, NULL, 0) > 0);#define N 10
for(int i = 0; i < N; i++)
{
fork();
printf("Hello World. I'm %d\n", getpid());
}#include <sys/wait.h>
#include <stdlib.h>
#include <unistd.h>
#include <stdio.h>
void tratar_exit_code(int status)
{
if (WIFEXITED(status))
{
// Ha terminado por culpa de un exit
int exitcode = WEXITSTATUS(status);
printf("Ha terminado por un exit con exit_code: %d\n", exitcode);
}
else {
// Ha terminado por un signal
int signalcode = WTERMSIG(status);
printf("Ha terminado con un signal con signal_code: %d\n", signalcode);
}
}
int main(int argc, char const *argv[]) {
for (int i = 0; i < 10; ++i)
{
// FORK
int ret = fork();
// HIJO
if (ret == 0)
{
exit(i);
}
// PADRE
int status;
waitpid(-1, &status, 0);
tratar_exit_code(status);
}
return 0;
}Por qué?
- Compartir información
- Acelerar la computación que realizan
- Modularidad
En linux se usan: signals, pipes y FIFOS.
Los signals son notificaciones que informan a un proceso de que ha sucedido un evento.
Evento -> Signal asociado
Están predefinidos por el kernel menos el SIGUSR1 y el SIGUSR2.
Cada proceso tiene un tratamiento asociado a cada signal, pero puedes modificar el tratamiento de cada signal, menos del SIGKILL y SIGSTOP.
| SIGNAL | TRATAMIENTO (por defecto) | DESCRIPCIÓN |
|---|---|---|
| SIGCHLD | Ignorar | El proceso hijo ha muerto o ha sido parado |
| SIGCONT | - | Continua si estaba parado |
| SIGSTOP | Stop | Para el proceso |
| SIGSEGV | Core | Referencia inválida a memoria (Segmentation Fault) |
| SIGINT | Terminar | Ctrl + C |
| SIGALRM | Terminar | La alarma ha sonado |
| SIGKILL | Terminar | Terminar el proceso |
| SIGUSR1 | Terminar | Definido por el proceso / usuario |
| SIGUSR2 | Terminar | Definido por el proceso / usuario |
- kill -> enviar un signal
- sigaction -> reprogramar un signal concreto
- sigprocmask -> bloquear signals
- sigsuspend -> esperar signals
- alarm -> programar la alarma
man signal
Si quieres más info sobre estas funciones mira el archivo comandos.pdf que hay en la carpeta de Utilidades
// Proceso A
int pid = 5555; // cualquier PID (pid del proceso B)
int signal = SIGUSR1; // cualquier SIGNAL
kill(pid, signal); // Le envia el Signal al proceso con pid PID// Proceso B
void func(int s) {
// ...
}
struct sigaction sa;
/* Inicializar sa con:
- handler -> func
- mask -> una máscara que creemos
- flags -> SA_RESTART
*/
sigaction(SIGUSR1, &sa, NULL);- sa_handler
- SIG_IGN -> ignorar el signal
- SIG_DFL -> tratamiento por defecto
- my_func -> función con cabecera: void my_func(int s)
- sa_mask
- vacía -> sólo se añade el signal que se está capturando
- Al salir se restaura la anterior
- sa_flags
- 0 -> configuración por defecto
- SA_RESETHAND -> después de tratar el signal se restaura el tratamiento por defecto
- SA_RESTART -> Si estás haciendo una llamada a sistema y recibes un signal, se reinicia la llamada a sistema.
- El proceso A apunta un signal en el PCB del proceso B
- El kernel ejecuta el código (ya sea el por defecto o el que ha especificado el proceso) para tratar el signal de B
Una máscara es una estructura de datos que permite determinar qué signals puede recibir un proceso en un momento determinado de ejecución.
sigset_t mask;
sigemptyset(&mask); // vacía
sigfillset(&mask); // llena
sigaddset(&mask, SIGNUM) // añade el signal a la máscara
sigdelset(&mask, SIGNUM) // elimina el signal de la máscara
sigismember(&mask, SIGNUM) // devuelve true si el signal está en la mascará, false si no.Para aplicar una máscara a mi proceso, usamos la función sigprocmask.
- SIG_BLOCK -> bloquea los signals de la máscara que le pases.
- SIG_UNBLOCK -> desbloquea los signals de la máscara que le pases.
- SIG_SETMASK -> intercambia las máscaras.
Para más información mira el archivo comandos.pdf en la carpeta de Utilidades
Para esperar a que llegue un signal puedes usar la función sigsuspend, que bloquea el proceso hasta que llega un signal que no es ignorado. Al salir del sigsuspend se restaura la máscara anterior.
Para más información mira el archivo comandos.pdf en la carpeta de Utilidades
Para sincronizar procesos se puede hacer de dos formas:
- Espera activa -> si vas a tardar poco
- while(!recibido)
- Bloqueo -> si vas a tardar bastante
- sigsuspend
void f_alarma() {
alarma = 1;
}
int main() {
// Configuramos
configurar_esperar_alarma();
// Declaramos
struct sigaction trat;
sigset_t mask;
// Configuramos el sigaction
sigemptyset(&mask);
trat.sa_mask = mask;
trat.sa_handler = f_alarma;
// Reprogramamos el signal
sigaction(SIGALRM, &trat, NULL);
// Esperamos a la alarma (signal)
alarm(2);
esperar_alarma();
}void configurar_esperar_alarma() {
alarma = 0;
}
void esperar_alarma() {
while (alarma != 1);
}void configurar_esperar_alarma() {
sigemptyset(&mask);
sigaddset(&mask, SIGALRM);
sigprocmask(SIG_BLOCK, &mask, NULL);
}
void esperar_alarma() {
sigfillset(&mask);
sigdelset(&mask, SIGALRM);
sigsuspend(&mask);
}- Estructuras de datos: PCB, threads (depende del SO)
- Estructuras de gestión: organizan los PCB en funcion de su estado
- Normalment colas o listas
- Eficientes
- Escalables
- Algoritmos de planificación
- Mecanismos del planificador
Contiene:
- PID
- userID y groupID
- Estado: RUN, READY, ...
- Espacio para salvar los registros de la CPU
- Gestión de signals
- Información sobre la planificación
- Información sobre la gestión de memoria
- Información sobre la gestión de E/S
- Accounting (recursos consumidos)
Normalmente se organizan en colas o listas.
- Cola de procesos
- Cola de procesos en READY
- Cola de procesos esperando E/S
El sistema mueve los procesos de una cola a otra.
La planificación debe ser muy rápida ya que se ejecuta muchas veces por segundo. Cada 10ms tiene una interrupción de reloj para que un solo proceso no pueda acaparar la CPU.
Un proceso en RUN no puede continuar (necesita datos de E/S, el proceso termina, ...) -> La planificación escoge otro proceso -> Eventos no preemptivos (preemptivo = puede quitar la CPU al proceso, sin que el proceso pueda evitarlo).
- Si le puedo quitar la CPU a un proceso -> EVENTOS PREEMPTIVOS
- Si es el proceso el que voluntariamente deja la CPU -> EVENTOS NO PREEMPTIVOS
Los procesos tienen ráfagas de computación y ráfagas de acceso a E/S que lo bloquean.
computación > E/S -> procesos de cálculo computación < E/S -> procesos de E/S
Cuando se cambia de un proceso a otro se hace un cambio de contexto que tiene los siguientes pasos:
- Ejecutando proceso A
- Guardar Contexto de A -> PCB de A
- Planificador decide ejecutar B
- PCB de B -> Restaurar Contexto de B
- Ejecutando proceso B
- Repetir.
Ejecutar código es modo usuario, todo lo demás, es modo kernel.
La planificación decide el tiempo total de ejecución de un proceso. Desde que llega al sistema hasta que termina (en todos sus estados) y el tiempo de espera del proceso (el tiempo que pasa en ready).
Los procesos se organizan según su estado. Están encolados por orden de llegada. El proceso recibe la CPU durante un quantum (10ms ó 100ms). El planificador hace una interrupción de reloj para que ningún proceso monopolice la CPU.
El RR se activa cuando:
- Un proceso se bloquea
- Un proceso termina
- Cuando termina el quantum
Es un política preemptiva porque puede quitarle la CPU a un proceso.
El proceso que está en RUN -> BLOCKED (cuando acabe irá a READY) El primer proceso en la cola de READY -> RUN
Ningún proceso espera más de (N - 1) * Q milisegundos. Donde N es el número de procesos y Q el tiempo de quantum.
- Q grande -> es como si fuesen orden secuencial
- Q pequeño -> produce overhead si no es muy grande comparado con el cambio de contexto.
- Busca PCB libre y lo reserva
- Inicializar datos (PID...)
- Se aplica política de Gestión de memoria
- Se actualizan las estructuras de Gestión de E/S
- (RR) Se añade a la cola de READY
- Código / Datos / Pila -> NUEVO
- Se inicializan las tablas de signals, contexto, ...
- Se actualizan las variables de entorno, argv, registros, ...
- Se liberan los recursos del proceso
- Se guarda el estado de finalización en el PCB
- Se elimina de la cola de READY
- Se aplica la política de planificación
- Se busca el proceso en la lista de PCB's para conseguir su estado de finalización
- Si está ZOMBIE -> el PCB se libera y se devuelve el estado de finalización al padre
- Si NO está ZOMBIE -> el proceso padre pasa de RUN -> BLOCKED
- Se aplica la política de planificación
- Físico -> Poner las máquinas en habitaciones / edificios seguros.
- Humanos -> Controlar quien accede al sistema
- SO -> evitar que un proceso sature el sistema, asegurar que siempre funcione, asegurar que ciertos puertos de acceso no están operativos, controlar que los procesos no se salgan de su espacio de direcciones.
- RED -> Es el más atacado
La CPU sólo puede acceder a la memoria y a los registros, por lo tanto, las intrucciones y datos deben estar cargados en memoria para poder referenciarse.
- Memoria física -> posición ocupada en memoria
- Memoria lógica -> referencia emitida por la CPU
No tienen por qué coincidir si existe un "traducción" (lo veremos más tarde).
- @ del procesador
- @ lógicas de un proceso (el kernel dice si son válidas)
- @ físicas de un proceso (las decide el kernel)
@ lógicas <--> @ física
-
Cuando se carga el programa: El kernel decide donde poner un proceso y se traducen las direcciones cuando las copias en memoria (@ físicas --> @ lógicas).
-
Cuando se ejecuta el programa: se traduce cada dirección que se genera (@ lógicas --> @ física). Lo hace la MMU + kernel.
La traducción es importante porque facilita la ejecución concurrente (en paralelo) de programas cargados en memoria (1 CPU pero N en MF) y facilita el cambio de contexto (no necesitamos cargar de nuevo en memoria el proceso).
SO debe garantizar protección:
- Cada proceso accede a su memoria, no a la de los demás
- MMU detecta accesos ilegales, SO configura la MMU

Asignación de instrucciones y datos se realizan en tiempo de ejecución
Ofrece soporte para la traducción y a la protección. SO -> configura la MMU MMU hace @lógica --> @física MMU envia excepción si @lógica no existe o no tiene una @física asociada SO -> gestiona las excepciones de la MMU
- Asignar nueva memoria
- Pedir / Liberar memoria
- Cambios de contexto
- @lógicas inválidas
- @lógicas válidas con acceso incorrecto (escribir en zona de lectura)
- @lógicas válidas con acceso incorrecto porque el SO hace alguna optimización
- COW
En cualquiera de estos casos, la MMU manda una excepción al SO
Ejecutable DISCO -> Memoria Física
SO:
- Lee el ejecutable
- Prepara esquema del proceso en memoria lógica
- Estructuras de datos
- Inicializa la MMU
- Lee secciones del programa
- Las escribe en memoria
- Carga el PC con el inicio del programa
La mayoría de sistemas POSIX usan ELF

Para verlo puedes usar
objdump -h ejecutable

- Reservar memoria
- Copiar el binario
- Actualizar MMU
- Carga bajo demanda
- Una rutina no se carga hasta que se llama.
- En las estructuras de datos del SO dicen que la zona de memoria es válida pero en MMU no se le asigna traducción.
- Cuando el proceso accede a la @lógica, la MMU le dice al SO que no sabe como traducir (excepción). El SO mira en sus estructuras de datos, ve que es una posición válida, provoca una carga y continua la ejecución.
- Librerías compartidas y enlace dinámico
- Los ejecutables no contienen el código de las librerías, sólo un enlace
- Se retrasa el enlace hasta el momento de ejecución
- Ahorra espacio en memoria
- Facilita la actualización de librerías (sin recompilar)
- El binario contiene un stub un tipo de rutina que hace puente a la que contiene el código realmente.
memoria dinámica se almacena en el heap y puedes ajustar su medida a lo que necesites.
// Anterior = posición del puntero antes de aumentar el heap
int anterior;
// Tienes que multiplicarlo por el sizeof del elemento que quieras almacenar
int nuevo = 6;
// Nuevo = cuántos elementos quiero almacenar
anterior = sbrk(nuevo * sizeof(int));con sbrk no puedes eliminar una variable que esté en medio del heap
Para ello usamos:
- malloc: hace lo mismo que el sbrk pero no siempre aumenta el heap porque no aumenta el tamaño que tu le digas, aumenta más tamaño por si luego necesitas más espacio.
- free: no mezclar sbrk's con malloc / free
// ...
for (int i = 0; i < 10; i++)
ptr = malloc(SIZE);
// Uso de la Memoria
// ...
for (int i = 0; i < 10; i++)
free(ptr);
// ...En la segunda iteración del bucle fallará puesto que si hemos vaciado ptr, ptr será NULL y por lo tanto no podemos hacer free(NULL).
int *x;
int *ptr;
// ...
ptr = malloc(SIZE);
// ...
x = ptr;
// ...
free(ptr);
sprintf(buffer, "%d", *x);Aquí tienes dos punteros que apuntan al mismo sitio por lo tanto si liberas la memoria de uno, el otro apuntará a una posición de memoria no válida y producirá error.
Cuando la memoria está libre pero no se puede usar para un proceso, tenemos un caso de fragmentación.
- Fragmentación interna: memoria reservada para un proceso pero no la usa.
- Fragmentación externa: memoria libre pero no puede ser asignada porque no es contigua. Se puede evitar compactando la memoria sin dejar huecos (costoso en tiempo).
- Contigua -> todo el proceso ocupa una partición que se selecciona en el momento de carga.
- No Contigua -> aumenta la flexibilidad, la granularidad de la gestión de memoria y la complejidad del SO y la MMU.
- Paginación: particiones fijas
- Segmentación: particiones variables

-
Espacio de @ lógicas dividido en particiones de tamaño fijo.
-
tamaño de las páginas -> marco
-
Asignar cada página del proceso en su marco libre -> cuando acaba el proceso devolver los marcos asignados a la lista de libres.
-
Facilita la carga bajo demanda
-
Permite protección a nivel de página
-
Compartición de memoria entre procesos
-
Una página pertenece a una región de memoria
(código / datos / heap / pila)
- Contiene la tabla de páginas de cada proceso
- Validez, permisos de accesos, ...
- Una entrada por página
- Suele guardarse en memoria
- El SO sabe la @ base de la tabla siempre (PCB)
- TLB: Caché de acceso más rápido
- Contiene info de traducción de las páginas más activas
- Cuando cambia la MMU se tiene que invalidar / actualizar la TLB
El problema de las tablas de páginas es su tamaño ya que están guardadas en memoria física. Tiene que ser una potencia de 2. Normalmente 4Kb. A medida que crece el espacio lógico de direcciones, se añaden secciones a la tabla de páginas.


- Se divide el espacio lógico teniendo en cuenta el tipo de contenido.
- Aproxima la gestión de memoria a la visión del usuario
- Tamaño variable -> segmentos
- Como mínimo un segmento para datos, otro para pila y otro para código
Para cada segmento:
- Busca una partición en la que quepa el segmento
- Aplica la política:
first fit(primero que encuentra)best fit(en el que mejor encaje)worst fit(el que más espacio extra tenga)
- Selecciona la cantidad de memoria necesaria para el segmento y el resto continúa en la lista de particiones libres
Puede haber fragmentación externa. No todos los trozos libres son igual de buenos.

Espacio lógico dividido en segmentos. Segmentos dividios en páginas.
size_segmento = num * size_pagina- A nivel de página o segmento:
- Librerías compartidas (implícito)
- Memoria compartida como mecanismo de comunicación
Copy On Write:
- Si no se accede a una zona nueva -> no necesitamos reservarla
- Si no modificamos una zona que es una copia (cualquier valor después de un fork) -> no necesitamos duplicar
Mientras en el fork no se produzca ningún cambio (no escribamos ninguna variable), se usa el mismo código, datos...
Se van reservando / copiando páginas de memoria a medida que se necesitan.
El kernel asume que no hace falta reservar / copiar la memoria, pero cuando accedemos / modificamos sabe que debe reservar / copiar ya que:
- En la estructura de datos del kernel: se guardan los permisos reales
- En la MMU: se marcan las regiones con permiso de solo lectura
- En la MMU: pone como direcciones de lectura las direcciones físicas asociadas (en el fork pondría que para leer acceda al código / datos... del padre, en el caso de reserva de memoria dinámica usa las páginas comodín)
Cuando intentas modificar la MMU lanza una excepción y el SO compara sus estructuras con las de la MMU y hace la gestion de la reserva real y reinicia el acceso.
- Intenta reducir la cantidad de memoria física asignada a un proceso.
- Reserva memoria física para la instrucción actual y los datos que esa instrucción referencia
- Sólo tener en memoria el proceso activo:
- Si el proceso necesita más memoria -> hacer un swap out (sacar procesos de memoria)
- Tener un dispositivo de almacenaje secundario (backing storage) donde se guarden los procesos (con más capacidad que la memoria física)
- Antes de ejecutar un proceso hay que cargarlo en memoria -> Ralentiza la ejecución
- Evitar expulsar de memoria procesos enteros
Reemplazo de memoria -> el SO necesita liberar marcos
- MMU: elimina la traducción de la página víctima
- Guarda el contenido de la página víctima en el área de swap.
- Asigna el espacio (página) que deja libre la página víctima a la página que necesita estar en memoria
Cuando se intenta acceder a una página que está en el área de swap -> se produce un fallo de página de la MMU.
Mover de SWAP -> Memoria Física: SO necesita:
- mira que el acceso sea válido
- Asigna un marco libre para la página (reemplaza si es necesario)
- Localiza el área de swap del contenido
- La escribe en el marco
- Actualiza la MMU

- La suma de los espacios lógicos de los procesos puede ser más grande que la memoria física
- Acceder a una página no residente es más lento que acceder a una página residente
- Porque tiene que hacer la excepción + cargar la página
- Es importante minimizar el número de fallos de página
Para minimizar el número de fallos se intenta seleccionar "páginas víctima" que ya no se vayan a usar o que tarden más tiempo en necesitarse. (Ejemplo: Least Recently Used)
Se intenta que siempre haya un marco libre.
THRASHING
- Invierte más tiempo haciendo el intercambio de memoria que avanzando en la ejecución
- No consigue mantener en memoria la cantidad mínima de página para continuar la ejecución
- Detección: controlar la tasa de fallos de página por proceso
- Tratamiento: Swap out
Queremos minimizar el número de fallos de páginas -> Anticipamos las páginas que va a necesitar el proceso y las cargamos.
Parámetros:
- Distancia: con qué antelación hay que cargar las páginas
- Número de páginas a cargar
Algoritmos:
- Secuencial
- Strided
- exec -> hace la carga de un nuevo programa
- fork -> copia del padre con COW e inicializa la Tabla de Páginas del hijo
- Planificación -> se actualiza la tabla de páginas en la MMU en el cambio de contexto y se invalida la TLB
- exit -> elimina la tabla de páginas del proceso y libera los marcos.
- Segmentación Paginada
- Tabla de páginas multinivel (2 niveles)
- Una por proceso, guardadas en memoria y la CPU contiene la @ base.
- Algoritmo de reemplazo:
- Aproximación de Least Recently Used
- Se ejecuta cada cierto tiempo y cuando el número de marcos libres es menor a un umbral
- Tabla de páginas multinivel (2 niveles)
- COW a nivel de página
- Carga bajo demanda
- Soporte para librerías compartidas
- Prefetch simple (secuencial)
