'compute_dh_matrix.m' - function to calculate the homogeneous transformation matrix according to the DH Parameter
'inertia_tensor.m' - function to initialize the inertia tensor with respect to the body fixed frame
'complete_dynamics.m' - main script file to calculate the dynamic equations of motion (torqe/force equations)
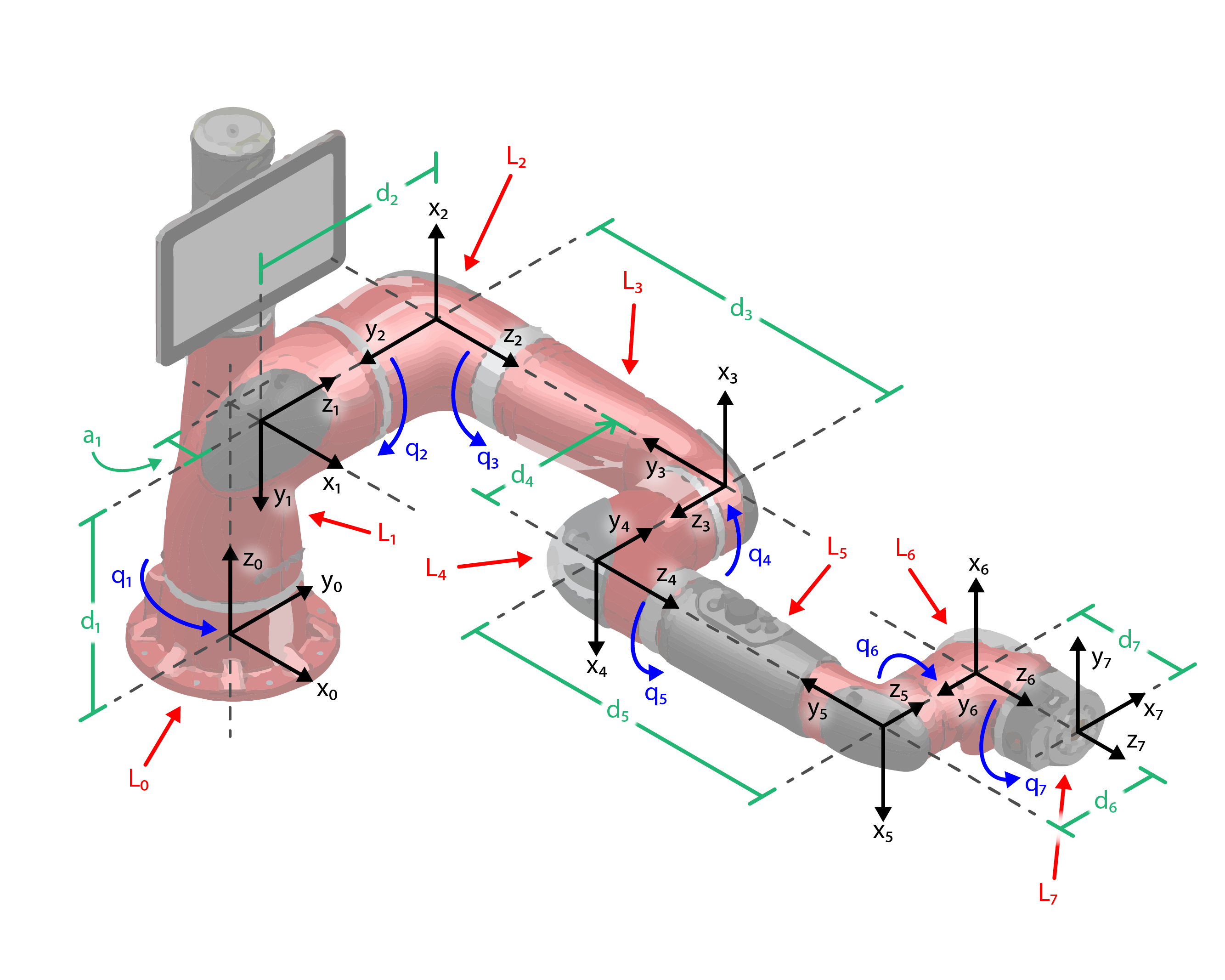
As an example, the dynamics of a 7 DOF robot arm called the Swayer Arm has been calculated
One needs to change the DOF value and the DH matrix in the 'complete_dynamics.m' file in order to obtain the desired equations of motion